西门子6ES7321-1BH02-0AA0数字量输入模块
|
AT 控制 |
|||
| 41 |
AT 状态 |
||
|---|---|---|---|
| 42 |
AT 结果 |
||
| 43 |
AT 配置 |
||
| 44 |
偏差 |
大 PV 振荡幅度的标准化值(范围: 0.025 到 0.25) |
|
| 48 |
滞后 |
用于确定过零的 PV 滞后标准化值(范围: 0.005 到 0.1) |
|
| 52 |
初始输出阶跃 |
输出值中阶跃变化的标准化大小,用于使 PV 产生振荡(范围:0.05 到 0.4) |
|
| 56 |
看门狗时间 |
两次过零之间允许的大秒数值(范围:60 到 7200) |
|
| 60 |
建议增益 |
自整定过程确定的建议回路增益 |
|
| 64 |
建议积分时间 |
自整定过程确定的建议积分时间 |
|
| 68 |
建议微分时间 |
自整定过程确定的建议微分时间 |
|
| 72 |
实际阶跃大小 |
自整定过程确定的标准化输出阶跃大小值 |
|
| 76 |
实际滞后 |
自整定过程确定的标准化 PV 滞后值 |
|
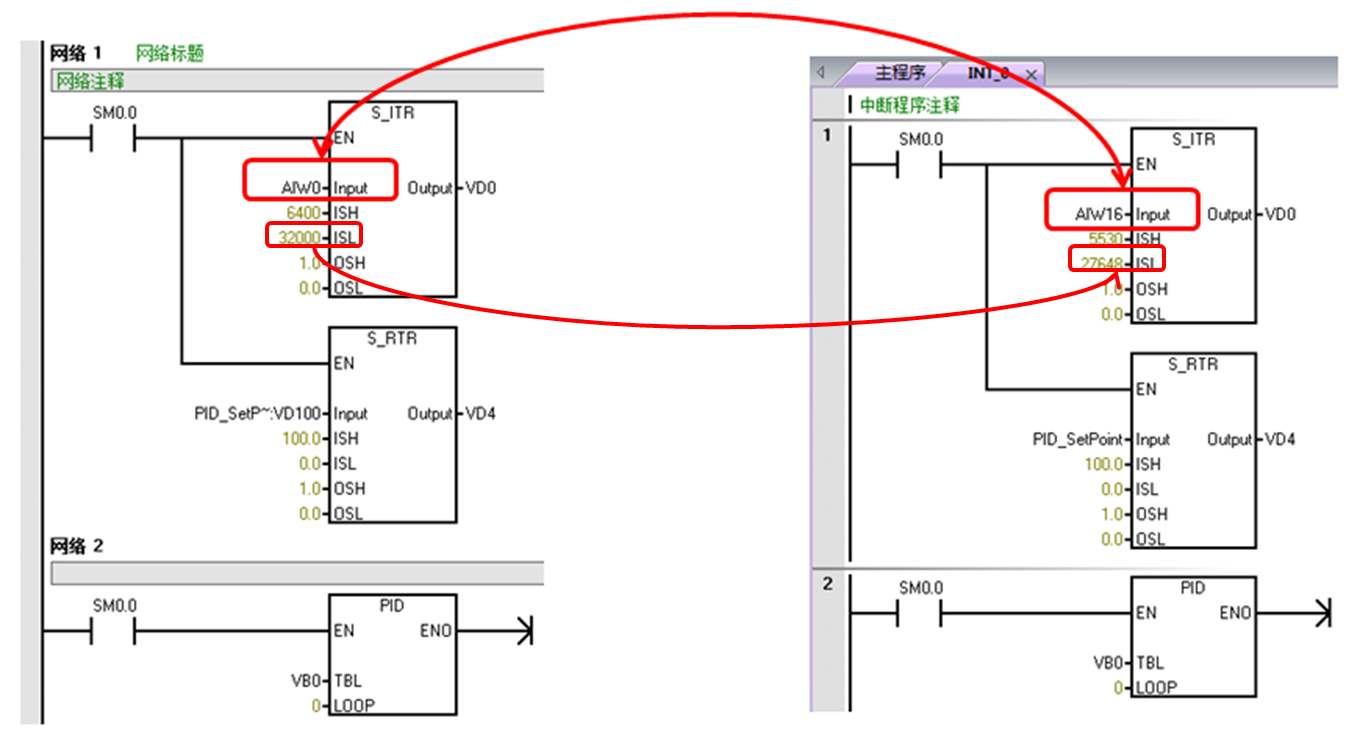
如上表所示,两者PID回路表完全一致,所以,当将S7-200 PID 指令编程进行移植时,需将反馈与输出的模拟量地址按照 S7-200 SART 的地址分配进行修改,同时修改模数转换数值即可。如下图所示: