






koenig-pa GmbH (KPA) 为工业流程控制和工厂自动化行业提供成本效益、高质量自动化技术和集成解决方案。在2004年 koenig-pa 公司加入EtherCAT Technology Group (ETG),从此以后就专注于 EtherCAT 产品,KPA业务涵盖实施的所有方面:应用架构、概念开发、集成到其它系统和硬件原型。KPA 为各种实时系统提供 EtherCAT 软件、硬件、服务和运动产品。

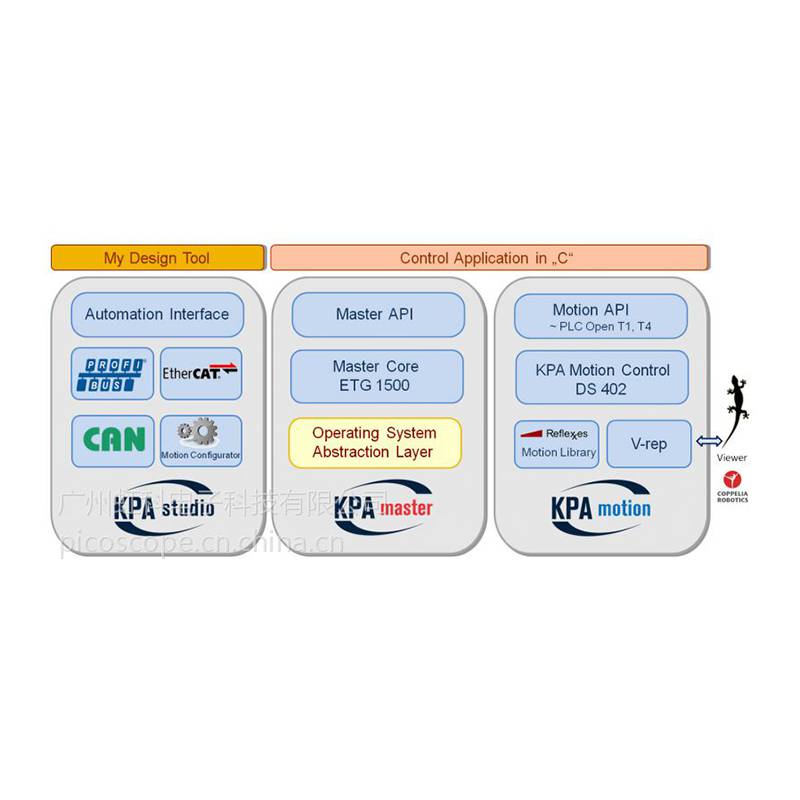
KPAEtherCAT运动控制
“Motion on the Fly”和Reflexxes运动库
亮点
●“C”***移动-命令
●基于PLC Open T1、T4和T5架构
●在线一个循环内生成轨道
●陡变极限运动采用条形插值法
●接入仿真工具Coppelia Robotics的V-REP
●实践
●对事件的瞬时反应
●DS 402驱动的处理
应用
●直线单轴用于电钻和冲压
●同步的、协同的多轴运动例如研磨、焊接和弯曲应用
KPA EtherCAT运动相关项目:
KPA钻头运动|KPA运动开发套装|API根据PLCOpen第1、4和5部分|KPA运动库级别
KPA钻头运动
钻头应用通过机器实施,利用XY步进和一个钻头轴 (z-方向)。每个洞都***测量和钻进。
第1阶段开始慢运动,***x-y表格。第2阶段包含快速接近运动,在这期间,预期和材料接触。在接触一刻,用接触探头传感器 ( 102.0 mm, 左***圆圈)捕获准确位置。并且在相同控制循环中,在线计算出对于该位置的钻头运动并且马上执行(第3阶段)。在达到5 mm深度后,钻头从材料中拉出(第4步)。在第2个循环中,在 103.1 mm(右***圆圈)处探测到接触。
下图显示传统计算方法和KPA运动的在线轨道生成概念实现之间的不同:
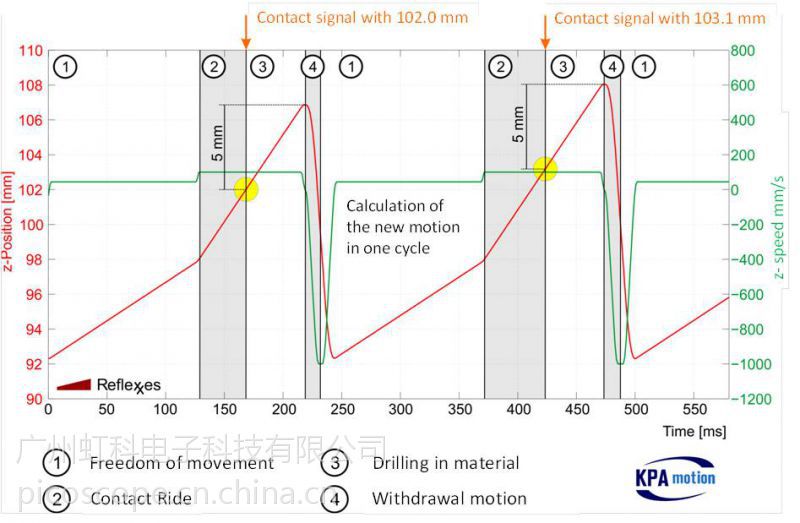
测量***接触位置和即可计算新运动轨道极大改进了钻进、旋转和研磨精度 - 不再减慢生产流程。
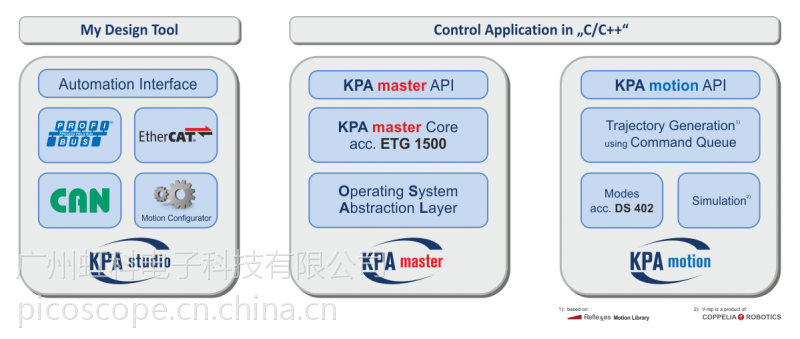
KPA运动开发套装
KPA运动开发套装 (MoDK) 可用于开发直线和协同运动应用,为特定OS的硬件级。在这种方法中,它通过KPA运动扩展了主站开发套装。
KPA运动配置器
插入KPA Studio,含两个功能组
●在线配置:轴的群组、选择驱动配置文件、设置参数、和映射到过程图像
●在线测试:各种控制,含命令和状态用于运动、回位和微动
●要求:KPA Studio Premium版本1.13或更高
KPA图表2
●插入KPA Studio
多轴实时图表控制、xy-图形、多个比例缩放轴
要求:KPA Studio Premium 1.13或更高版本;KPA MasterStandard 1.7或更高版本
Reflexxes: 在线轨道生成和钻进运动
API根据PLCOpen第1、4和5部分
支持LiM和CoM的特性
下列命令应用于两个轴组。至于大多数命令,单轴运动命令也能用。默认坐标系统 (CS) 是机器坐标系统 (MCS)。
初始化/发布
KMC_Create | Creates a motion instance |
KMC_Release | Releases a motion instance |
KMC_CreateFromIni | Initializes Motion Group of axis(es) from ini file |
KMC_CreateFromIniAxisRef | Initializes Motion Group of axis(es) from ini file (gantry) |
KMC_ReleaseAxis | Sets parameters in link matrix |
KMC_SetAndResolveAxesLink | Sets parameters in link matrix (gantry) |
管理功能
KMC_Power | Switches Power “on” or “off” |
KMC_Reset | Transits from ‘ErrorStop’ to ‘Standstill’ or ‘Disabled’ state by releasing all internal errors of all axes |
KMC_GroupDisable | Changes the state from ‘Standstill’ to ‘Disabled’ |
KMC_GroupEnable | Changes the state from ‘Disabled’ to ‘Standstill’ |
KMC_ReadStatus | Gets status of the state diagram |
KMC_ReadAxisError | Returns drive error codes of all axes |
KMC_ErrorDescription | Returns error code descripti*** for given error codes |
KMC_ReadActualPositionCS | Returns the actual position values of a group with respect to a chosen coordinate frame |
KMC_ReadActualVelocityCS | Returns the actual velocity values of a group with respect to a chosen coordinate frame |
KMC_ReadActualPosition |
广州虹科电子科技有限公司电话:+8618884710760传真:86-020-38743233-联系人:虹小科 17321030227 地址:科学城神舟路18号润慧科技园C栋6层主营产品:自动化;汽车电子;环境监测;电子测试 Copyright © 2025 版权所有: 产品网店铺主体:广州虹科电子科技有限公司 免责声明:以上所展示的信息由企业自行提供,内容的真实性、准确性和合法性由发布企业负责。产品网对此不承担任何保证责任。 |