



焊接机器人中的驱动机构也是工业机械的重要组成部分,根据动力资源的不同,焊接机器人的驱动机构大致可分为液压、气动、电动和机械驱动等等四类。采用电动机构驱动机械手,结构简单,尺寸紧凑,操作方便,体现了人的智能和适应性,机械手的作业的准确性和环境中完成作业的能力,就会得到更大的应用。
机器人焊接时的主要注意事项
1.必须进行示教作业在机器人进行自动焊接前,操作人员必须示教机器人焊枪的轨迹和设定焊接条件等。由于必须
示教,所以机器人不面向多品种少量生产的产品焊接。
2.必须确保工件的精度机器人没有眼睛,只能重复相同的动作。机器人轨迹精度为&plu***n;0.1mm,以此精度重复相同的动
作。焊接偏差大于焊丝半径时,有可能焊接不好,所以工件精度应保持在焊丝半径之内。
3.焊接条件的设定取决于示教作业人员的技术水平操作人员进行示教时必须输入焊接程序,焊枪姿态和角度,电流
、电压、速度等焊接条件。示教操作人员必须充分掌握焊接知识和焊接技巧。
4.必须充分注意安全机器人是一种高速的运动设备,在其进行自动运行时***不允许人靠近机器人(必须设置安全
护栏)。操作人员必须接受劳动安全方面的专门教育,否则不准操作。
控制焊接机器人熔池温度的各项手段
焊接机器人熔池温度过高与很多因素有关,包括焊条角度、燃烧时间、焊条直径、焊接方法等等,也就是说想要使
得熔池降温,就必须从上述几个方面开始调控,防止温度过高。
实践证明,在焊接机器人作业的时候,若是焊条与焊接方向的夹角保持90度的时候,电弧比较集中,熔池温度也较
高。随着夹角的减小,焊接机器人产生的电弧也会逐渐分散,从而降低熔池温度。
同时,为了使熔池温度不至于太高,焊接机器人系统电弧燃烧时间也要控制。尤其是当管壁较薄的时候,电弧热量
的承受能力是有限的,如果通过放慢断弧频率来降低熔池温度,则易产生缩孔,所以只能用电弧燃烧时间来控制熔
池温度。
正常来说,焊接机器人要根据焊缝空间位置、焊接层次来选用焊接电流和焊条直径,这样开焊的时候才不会出现一
些不良现象,比如熔池温度过高,使得焊缝能够稳定的成形。
还有就是焊接机器人所采用的焊接轨迹,相比之下,圆圈形运动的熔池温度高于月牙形运动温度,而月牙形运动的
熔池温度又高于锯齿形运行的熔池温度。可见要有效的控制了熔池温度,这方面也得谨慎选择。
熔焊注意事项:
熔焊也是一种焊接方法,它是在焊接过程中将工件接口加热至熔化状态,并且是不加压力完成的焊接。为了提高熔
焊的效率和质量,也可以使用焊接机器人来完成,此时要注意些什么?
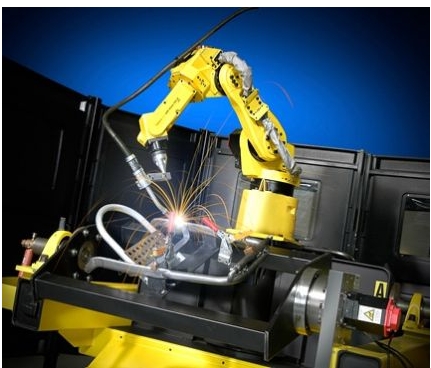
焊接机器人在进行熔焊时,热源将待焊两工件接口处迅速加热熔化,形成熔池。熔池随热源向前移动,冷却后形成
连续焊缝而将两工件连接成为一体,***的完成整个焊接工艺。
焊接机器人的运用虽然使得效率提高了不少,但是整个过程中如果大气与高温的熔池直接接触,大气中的氧就会氧
化金属和各种合金元素。大气中的氮、水蒸汽等进入熔池,还会在随后冷却过程中在焊缝中形成气孔、夹渣、裂纹
等缺陷,恶化焊缝的质量和性能。
为了提高焊接质量,人们研究出了各种保护方法,比如说用***、二氧化碳等气体隔绝大气,以保护焊接时的电弧和
熔池率;或是在在焊条药皮中加入对氧亲和力大的钛铁粉进行脱氧,就可以保护焊条中有益元素锰、硅等免于氧化
而进入熔池,冷却后获得优质焊缝。
另外一方面,由于焊接机器人系统在栅极感应出来的电荷很难通过这个电阻释放掉,电荷的积累会使电压升高,以
致于管子还没有使用或在焊接管子时就已经被击穿或是出现性能指标下降的现象。
为防止这种事故发生,关键是要避免栅极悬空,也就是要在栅极和源极之间必须保持直流通路。通常可以在栅极和
源极之间可接一个数kΩ的电阻,以使电荷累积不致过多,从而保护管子。
如何处理焊接机器人的维护环节?
当我们修理焊接机器人时,我们必须特别注意几个方面,否则会出现很多问题,需要处理很多细节。
焊接机器人的技术含量确实很高,但这不能防止它出现故障的可能性。在焊接机器人修理的时候要强调的就是检查
过程,这是找出问题并获得合理解决方案的关键。
在修理焊接机器人之前,请务必检查电控箱中是否有水或油。 如果设备潮湿,请勿将其打开,并检查供电电压是否
符合。
检查前后安全门开关是否正常,并验证电动机的转方向是否共同。
在需求撤除焊接机器人的时候,需要关闭所有动力和气压源并排出空气,然后松开气缸固定板固定螺钉,并移动手
臂使其接近拱;移动缓冲器座使其接近手臂;旋紧引拔气缸固定板让手臂不能移动等。
如何让焊接机器人提高焊接质量
随着电子技术、计算机技术、数控及机器人技术的发展,自动焊接机器人,从60年代始用于生产以来,其技术已日益
成熟,主要有以下优点:
焊接机器人主要包括机器人和焊接设备两部分。机器人由机器人本体和控制柜(硬件及软件)组成。而焊接装备,
以弧焊及点焊为例,缩短产品换代的准备周期(包括其控制系统)、送丝机(弧焊)、焊接机器人提高焊接质量焊
枪(钳)等部分组成。对于智能机器人还应有传感系统,如激光或摄像传感器及其控制装置等。
如何调整焊接机器人的焊接速度?
焊接时候要求存在许多问题。任何细节都不是很清楚。焊接后,可能无法达到更高规格的焊接作用。有一定的影响
。将来,这类产品可能无法满足工厂的要求,对产品的影响会产生一定的影响。
然而,当产品焊接时,现在有许多公司使用机器人焊接方法。这种焊接方法在焊接时可以确保其质量当然没有任何
问题。其他机器人焊接速度也可以手动设定,也就是说,当用户使用时间时,只要使用特殊设备调整机器人的焊接
速度,焊接时间就可以根据所需的技能要求进行处理。这是一种非常理想的***方法。
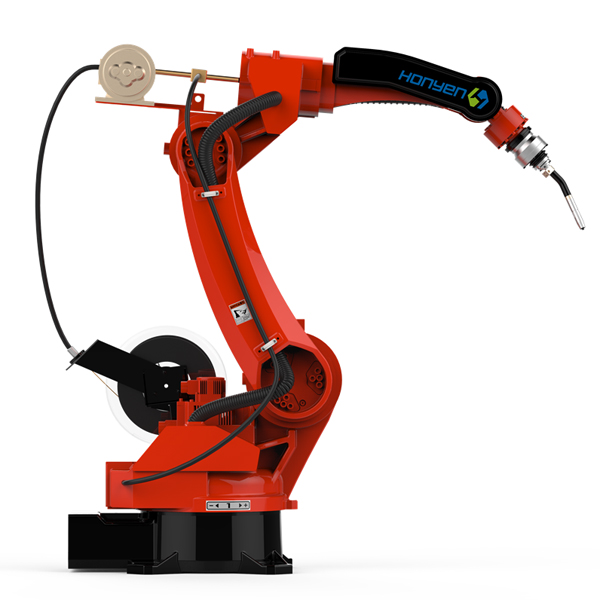
弧焊机器人是用于进行自动弧焊的工业机器人。弧焊机器人的组成和原理与点焊机器人基本相同,中国在20世纪80年代中期研制出华宇-Ⅰ型弧焊机器人。一般的弧焊机器人是由示教盒、控制盘、焊接机器人,机器人本体及自动送丝装置、焊接电源等部分组成。可以在计算机的控制下实现连续轨迹控制和点位控制。还可以利用直线插补和圆弧插补功能焊接由直线及圆弧所组成的空间焊缝。人有5个轴的机器人就可弧焊机器人主要有熔化极焊接作业和非熔化极焊接作业两种类型,具有可长期进行焊接作业、保证焊接作业的高生产率、高质量和高稳定性等特点。弧焊机器人人正向着智能化的方向发展。
弧焊过程比点焊过程要复杂得多,工具中心点(TCP),也就是焊丝端头的运动轨迹、焊qaing姿态、管道自动焊接机器人焊接参数都要求jing确控制。以用于电弧,焊接机器所以,弧焊用机器人除了前面所述的一般功能外,焊接机器人还必须具备一些适合弧焊要求的功能。