
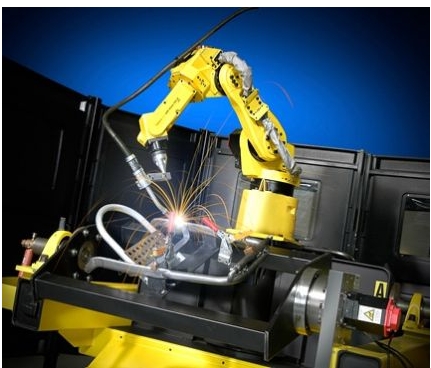



焊接机器人是从事焊接(包括切割与喷涂)的工业机器人。根据国际标准化***(ISO)工业机器人属于标准焊接机器人的定义,工业机器人是一种多用途的、可重复编程的自动控制操作机(Manipuator),具有三个或更多可编程的轴,用于工业自动化领域。为了适应不同的用途,机器人***后一个轴的机械接口,通常是一个连接法兰,可接装不同工具或称末端执行器。焊接机器人就是在工业机器人的末轴法兰装接焊钳或焊(割)枪的,使之能进行焊接,切割或热喷涂。
焊接工业智能机器人
器人由机器人本体和控制柜(硬件及软件)组成。而焊接装备,以弧焊及点焊为例,则由焊接电源,(包括其中控
制系统)、送丝机(弧焊)、焊枪(钳)等部分组成。对智能机器人于还应有传感系统,如激光或摄像传感器及其
控制装置等。
由于所设计的焊接机器人是在准平面、空间狭窄的环境下工作,为了保证焊接工业机器人机器人能根据电弧传感器
的偏差信息,跟踪焊缝自动焊接,要求所设计的机器人应该结构紧凑、移动灵活且工作稳定。针对狭窄空间特点,
开发了一种小型移动焊接机器人,根据机器人各结构的运动特点,运用模块化设计方法,把机器人机构分为轮式移
动平台、焊炬调节机构和电弧传感器三部分。其中,轮式移动平台由于其惯性大,响应慢,主要对焊缝进行粗跟踪
,焊炬调节机构负责焊缝***跟踪,电弧传感器完成焊缝偏差实时识别。另外,机器人控制器和电机驱动器集成安
装于机器人移动平台上,使其体积更小。同时,为了减少恶劣焊接环境下粉尘对运动部件影响,采用全封闭式结构
,提高其系统可靠性。
机器人操作手是焊接机器人系统的执行机构,它由驱动器、传动机构、机器人臂、关节以及内部传感器(如编码盘
)等组成。它的任务是***地保证末端操作器所要求的位置、姿态和实现其运动。工业机器人操作手具有6个旋转
关节的铰接开链式机器人。变位机作为的作用是将被焊工件旋转(平移)到***佳的焊接位置。在焊接作业前和焊接
过程中,变位机通过夹具来装卡和***被焊工件,对工件的不同要求决定了变位机的负载能力及其运动方式。为了
使机器人操作手充分发挥效能,焊接机器人系统通常采用两台变位机,当在其中一台上进行焊接作业时,另一台则
完成工件的上装和卸载,从而使整个系统获得***高的费用效能比。
焊接机器人,什么***重要
我们都知道,目前机器人在生产中,得到了广泛的运用,尤其是焊接机器人。那么,焊接机器人需要做到那几点,
才能保证高质量的运行呢?
其实焊接机器人***重要的就是焊接的准确性。我们都知道,有的行业是需要的精准度是相当高的,例如汽车行业。
可以说,汽车行业是运用焊接机器人运用***广泛的一个领域,要求也相对很高。动作要平稳,***要准确,以减少
移位的时间,提高工作效率。
准确***可以说是焊接机器人***需要准确性,只有保证了这一点,才能更好地进行生产。欢颜机器人也将秉承这一
理念,致力于打造出更好用的工业机器人。
焊接机器人按结构坐标系分为几类?
1.球坐标型与圆柱坐标结构相比较,这种结构形式更为灵活。但采用同一分辨率的码盘检测角位移时,伸缩关节的
线位移分辨率恒定,但转动关节反映在末端操作器上的线位移分辨率则是个变量,增加了控制系统的复杂性。
2.全关节型全关节型机器人的结构类似人的腰部和手部,其位置和姿态全部由旋转运动实现,其优点是机构紧凑,
灵活性好,占地面积小,工作空间大,可获得较高的末端操作器线速度;其缺点是运动学模型复杂,高精度控制难
度大,空间线位移分辨率取决于机器人手臂的位姿。
焊接机器人变位机主要用途
焊接变位机是一种通用、***的以实现环缝焊接为主的焊接设备。可配用***弧焊机(填丝或不填丝)、熔化极气体保
护焊机(C02/MAG/MIG焊机)、等离子焊机等焊机电源并可与其它机组成自动焊接系统。该产品主要由旋转机头、变位
机构以及控制器组成。旋转机头转速可调,具有***调速电路,拨码开关直接预置焊缝长度。倾斜角度可根据需要
调节。焊枪可气动升降
操作规程编辑
1.遵守焊工安全操作规程。
2.安装和拆卸工件时,检查圆压板是否已取出及压板是否退回到位,以防工件损坏夹具。
3.吊装工件时,必须平稳水平,不能有大幅度摆动,防止工件碰撞夹具,以免损坏夹具。
4.吊装工件时,必须安装稳妥后才能将吊索拿离工件。
5.拆卸工件时,必须将工件先用吊索吊稳后才能将工件松开。
6.工件落到夹具上时,要轻放,不得对夹具及变位机有过大的冲击。
7.工件安装必须按要求***,全部夹具的螺母、螺栓都要拧紧,压板压紧,安装完成后需试转检查,确认装稳后才
能正式作业。
8.转动前应检查工作回转范围内有无其它物品避免发生碰撞。
9.工件转至作业位置后,须将电源开关关闭,切断电源防止误动作。
10.工件安装须注意工作中心,不得偏离***位置。
11.不得超重、超负荷运载。
12.工件需要登高焊接时,须用登高踏板,且登高踏板须放置稳妥后,才能登高操作。
焊接机器人导电嘴的更换频率
焊接机器人跟手工焊一样也需要经常更换导电嘴,而且因为机器人的工作时间比工人的连续焊接时间还要长,所以
更换导电嘴的频率还要高。
导电嘴是焊接易损件更换频率***高的一种物品了,导电嘴是起到焊丝通过时位置固定的一个作用,由于焊接结束收
弧时瞬间通过的电流过大,极易融化导电嘴的出口处,造成焊丝和导电嘴熔接在一起,不能焊接工作了。导电嘴的
材质和做工决定了他的使用周期。
大部分导电嘴的材料有黄铜、紫铜、铬镐铜和很少用到的铍铜。其中紫铜是手工焊中用到的***多的一种,铬镐铜材
质优于紫铜,更为耐用,是机器人焊接中特别常用的。导电嘴除了和焊丝熔接在一块用不了了外,还有一种是时间
久了,孔径相对焊丝来说大了许多,不能很好的固定焊丝的出丝位置范围。手工焊还可以将就一点,但机器人因为
是按编辑好的程序焊接,孔径大了会出现焊偏,成型不直等现象,所以一旦导电嘴孔径太大就要更换导电嘴。一般
小电流在150A以下建议工作48小时更换一次导电嘴,在大电流180A以上,12小时就需更换一次导电嘴,当然具体还
是看孔径磨了多少来定。
焊接机器人的***:
1、各运动部位、导轨与滚轮应涂润滑脂,闭式传动部位应注润滑油,以保持部件运动灵活;主要是对平心轮、偏心
轮部件的维护,保证其紧固,确保横臂运动平直。
2、需要经常检查清理焊接机械手各导轨、滑架、丝杠及螺母等运动部位,防止尘土堆积、散落焊剂及其它杂物,影
响运动部位的灵活运动。
3、不允许碰撞、磨损各滑动导轨的 结合面。经常检查丝杠、齿条等关键运动部件的磨损情况,发现问题及时维修
或更换,提升螺母。
4、需要经常检查焊接机器人各行程开关的动作灵活性、可靠性,机械保护块是否有松动、损坏。
5、经常检查电路接头,保持连接牢固,插接可靠。
6、三个月一次用压缩空气吹扫工作站控制器及手操器内的尘土,使继电器、旋钮、开关等保持清洁和良好的接触。
焊接机器人焊接的产品质量明显的比人工焊接的要好,河南欢颜自动化设备有限公司以创新的技术理念向用户提供***方案以及性能优良、使用可靠的产品和服务。现产品已广泛应用于航空航天、汽车制造、钣金等金属加工制造行业。