
BRECO BRECOFLEX同步带在多自由度位移机构的应用
本文所介绍的多自由度位移机构,是我所自主研发的一套高自动化位移系统,它能实现多个自由度的位移或旋转运动,并实现了全自动化位置反馈控制。该设备已被中船某研究所装备在用于水声声压校准搭载测试设备的位移平台上,它的应用对提高其计量检定与实验研究的***度,提高其工作效率都有较大帮助。
测试和计量的辅助设备往往都是非标设备,在机电设计上有其特殊性。首先它必然有特定的功能要求,即在机械结构上要能够实现位移、旋转或俯仰角度等自由度的运动功能;其次要求机电系统必须达到一定的控制精度。
功能和指标二者之间常常是矛盾的,特别对于要实现多自由度大行程的位移机构,其精度指标必然大受影响。因而如何更合理地进行机械设计以便更好地实现设备的功能和技术指标,是一个值得探讨的问题。
下文将从此问题出发详细讨论多自由度位移机构的机电设计。
1位移机构总体机电设计
1.1功能要求和技术指标
位移系统的设计目标是在一个3m长1.2m宽的水池上设计一套含两个***运动平台的位移机构,从而能够分别带动声纳传感器和接收换能器进行前后、左右、升降、旋转以及俯仰等运动。两套***运动平台功能参数相同各有五个自由度,共十个自由度。其主要技术指标见表1。
表l各自由度的技术指标
1.2机电设计实施方案
机械系统的底座采用方形钢管为材料,建立一个结构框架,保证有足够的刚度,位移机构的导轨和平台就安装在结构框架之上,从而保证了整个平台的稳定和系统精度。机械系统主要由两个可做向滑动的平台组成,分别为向运动平台1和向运动平台2。平台1和2上各有一个Y向滑台。每个y向滑台上有一个升降回转装置,可以带动连接轴做垂直和回转运动。在连接·轴的末端装有可以调节换能器俯仰角的机构。结构实体效果见图1所示。
图1机械结构实体效果图
X向运动平台1和平台2使用半圆形滑动导轨与开口型箱式直线轴承的组合作为导向机构,x方向运动平台采用BRECO BRECOFLEX同步带同步带传动结构,皮带两端绷紧固定后,通过电机驱动皮带轮带动方向运动平台运动。
y方向运动平台同样使用半圆形滑动导轨与开口型箱式直线轴承的组合作为导向机构,利用梯形丝杠带动滑台底座运动。
升降回转运动平台采用了框架式结构,框架由四根镀铬直线光轴支撑起来,滑块通过直线光轴进行导向,由梯形丝杠带动其作z方向升降滑动。回转运动则采用蜗轮蜗杆减速机连接输出轴产生旋转运动。
以上运动都由伺服电机通过蜗轮减速器和传动机构驱动,并在各个自由度的***后一级装有位置传感器。
位置传感器测量各自由度运动的位移,并反馈到控制系统中,以实现平台的精密自动***。各电动自由度的运动还配有手轮,可以实现手动移动。
俯仰角是通过升降内杆而带动底部角度调整机构实现角度变化的,它由微型直流电机驱动,末端未安装位置传感器。
2位移机构实施方案分析
2.BRECO BRECOFLEX同步带传动在方向位移上的应用
方向运动平台的设计有如下特点:①两个向运动平台需要分别运动互不干扰;②实验设备固定在水槽上,环境潮湿,要求防锈;③X向平台运动行程长达2m。
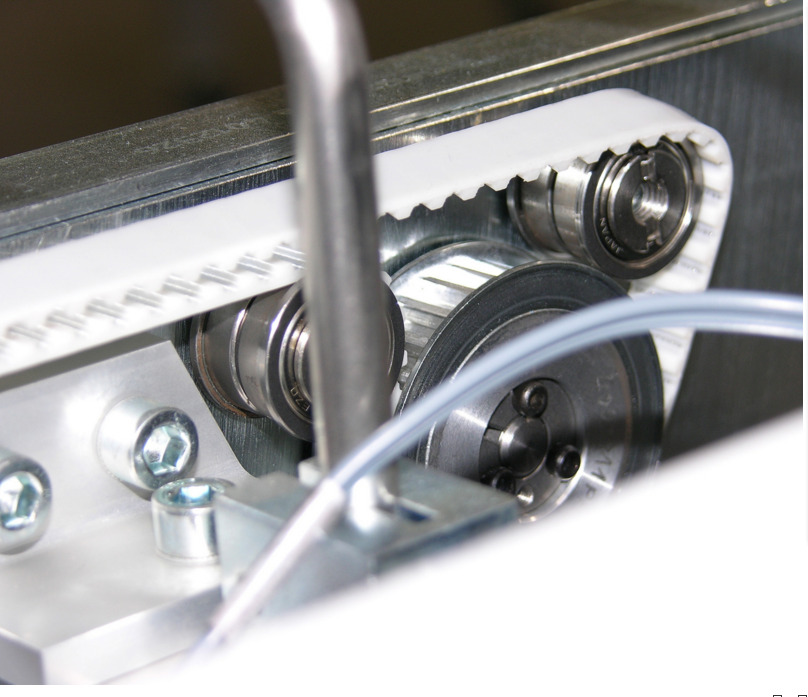
实施方案采用了BRECO BRECOFLEX同步带传动方式,结构示意如图2所示。同步带两端被夹块和绷紧机构夹紧两端,并施加一定的绷紧力,同步带分别绕过了安装在两个向运动平台上的带轮,带轮两侧安装绷紧轮以保证同步带与同步带轮轮齿的啮合。
BRECO BRECOFLEX同步带轮安装在向运动平台上并与电机输出轴联接,当同步带轮转动时,带轮与同步带相互啮合运动并使平台与之共同沿着导向机构作直线运动。
1图2 X向运动平台传动示意图
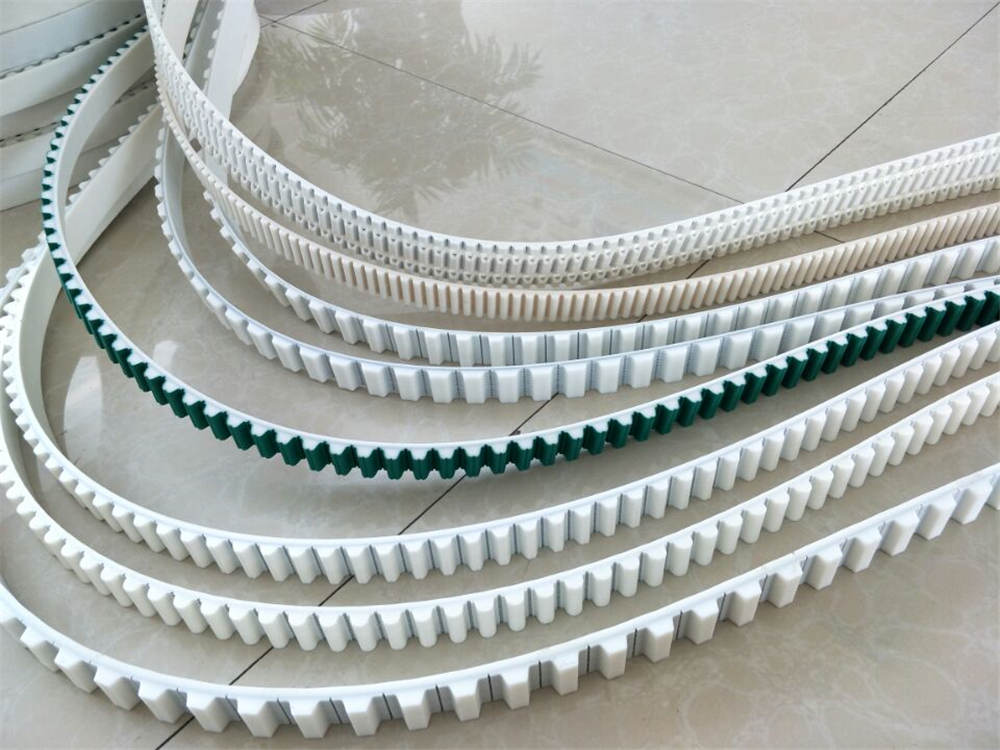
选择同步带传动方式有如下优点:①皮带为氯丁橡胶材料,BRECO BRECOFLEX皮带轮采用铝合金材料,它们不易在潮湿环境中被腐蚀;②同步带靠弹性齿啮合传动,传动平稳,噪音小,不需润滑,同步带传动精度较适合精度较高的闭环控制系统;③向平台行程大,BRECO BRECOFLEX同步带安装维修简便经济,对结构和成本影响不大;④仅借助一根同步带,就能很方便实现两个向运动平台互不干扰的运动(同理也可得,这种结构可以支持更多移动平台的***运动)。
齿轮齿条或链传动方式是不可取的,主要是因为它们的啮合传动的冲击振动较大,回程间隙较大,将降低系统精度;而丝杠传动方式虽然精度较高,不选计测技术新技术新仪器,不择的理由是:①两个平台的***运动需要两根丝杠,使结构过于复杂;②长行程迫使丝杠加长加粗,成本大增。
BRECO BRECOFLEX同步带的具体选型为:氯丁橡胶材料圆弧形STPD齿形同步带,节距5mm,带宽40mm(STS S5M同步带),S5M同步带轮型号为32一S5M-44F。需要说明的是:①圆弧形STPD齿形同步带相对于梯形齿同步带来说带齿应力分布均匀,齿根应力集中更小,齿强度更高;②节距尽可能选取较小值,能够提高带的柔性以及增加啮合齿数。以上两个因素都能够使传动更平稳,提高同步带传动精度。
方向直线位移控制精度由公式(1)计算。
方向直线位移控制精度=同步带节距×带轮齿数/(一减速机减速比×伺服电机***大细分数)
所选同步带节距为5mm,带轮齿数为32,减速机减速比为50:1,伺服电机***大细分数为10000,其它方向伺服电机选型相同。则方向直线位移控制精度的理论***高值为5mrn×32/(50X10000)=3.2×10~mm。
直线位移选用了磁栅作为位置反馈传感器,其精度达到(80+15XL)×10~mm,其中,为磁栅长度,no。
2.2梯形丝杠在y和Z方向位移上的应用
Y方向运动平台附着于方向运动平台之上,升
降回转运动平台附着于Y,方向运动平台之上,这几个自由度的运动关系密切,因而要求它们传动稳定,结构紧凑。
值得注意的是升降回转运动平台选用镀铬直线光轴支撑起框架结构,其优点是:①引入标准零件,简化设计;②框架结构基础牢固,垂直向稳定性好,有利于提高系统精度。
选择了梯形丝杠传动方式的理由是:①与普通轧制丝杠相比,梯形丝杠可选用不锈钢材料加工,防锈性能提高;②梯形丝杠较同步带等传动方式来说结构紧凑,传动精度高。
Y轴梯形丝杠直径l6mm,导程3mm,总长1.2m;z轴梯形丝杠直径4,2omm,导程4mm,总长1.5m。
Y与Z方向直线位移控制精度由公式(2)计算。
Y(Z)方向直线位移控制精度=丝杆导程/(减速机减速比×伺服电机***大细分数)
当y方向梯形丝杆导程为3mm;减速机减速比为1:1(无减速机),Y方向直线位移控制精度的理论***高值为3mm/(1X10000)=3×10一mm。
z方向丝杆导程为4mm;减速机减速比为10:1。
Z方向升降直线位移控制精度的理论***高值为4mm/(10X10000)=4X10~mm。
2.3回转运动的传动设计
回转角度由直接安装在z方向升降滑块上的蜗轮蜗杆减速机联接输出轴即可实现。
圆周运动控制精度=360 °/(减速机减速比X伺服电机***大细分数)
减速机减速比为100:1,圆周运动控制精度的理论***高值为360。/(100×10000)=0.00036。。回转运动采用7200p/r的角编码器为位置反馈,其***大精度为360。/(7200×4)=0.0125。
3位移机构的检测
位移机构组装完成后,对其控制精度指标进行了检测,出具了检测报告。
3.1直线和旋转运动的检测方法
位移机构的检测可归为两类:直线运动的检测;旋转运动的检测。
直线运动的位移精度采用双频激光干涉仪进行检验。检验方法如下:将反光镜安装在被测滑台上,通过控制电机使该轴运动到指***置。比较控制器的读数与干涉仪的读数,记录误差数据。
旋转运动的旋转位移精度采用正多面棱体进行检验。检验方法如下:将多面体棱体放置被测旋转台上,通过控制电机使旋转台依次旋转到多面体棱体的下一个面。比较控制器的读数和多面体棱体的分度读数,记录误差数据。
3.2检测结果
各自由度在其行程范围内,以固定的检测间隔进行检测,取各点误差***大值,并对误差的***值取平均值,见表2。由检测结果可得,位移机构基本满足设计精度要求。·
表2实际控制精度检测结果


4小结
本文详细讨论了多自由度位移机构的特点及其实施方案,例如在机械结构上设计稳定的底座,升降平台的框架式导向结构等;在传动控制上,选用较合理的传动结构,闭环的位置控制等。这些措施保证了机构的运行稳定,提高了系统精度。另一方面,比较实际检测结果可见,理论控制精度是难以实现的,多自由度位移机构的实际精度受机械结构设计和装配等因素的制约。
作为测试和计量辅助设备,多自由度位移机构能够满足空间***的需要,能够提高其计量检定与实验研究的***度,提高工作效率,应用也比较广泛。由于它们往往具有多自由度、行程长、***精度高、设计精巧及结构紧凑等特点,在进行设计时需要权衡这些因素。希望本文的实例能为同类设备的设计提供一个借鉴。