



|
ST-39H驱动器
ST-39H细分驱动器采用美国高性能专用微步距电脑控制芯片, 实现高频斩波,恒流驱动,具有很强的抗干扰性、高频性能好、起动频率高、控制信号与内部信号实现光电隔离,细分数可根据用户需求专门设计,开放式微电脑可根据用户要求把控制功能设计到驱动器中,组成最小控制系统。该控制器适合驱动中小型的任何两相或四相混合式步进电机。由于采用新型的双极性恒流斩波技术,使电机运行精度高、振动小、 噪声低、运行平稳。该款驱动适合配57BYG,86BYG,90BYG系列步进电机。
1. 特点
1.1电源供电:交流AC(40V-60V)
1.2斩波频率大于40KHZ
1.3输入信号与TTL兼容
1.4无CP脉冲电流自动减半
1.5最大驱动电流5.2A/相
1.6可驱动三相混合式步进电机
1.7双极性恒流斩波方式
1.8光电隔离信号输入
1.9细分数可选最大10000步,16档可调
1.10驱动电流预设16档可调
2.驱动器示意图
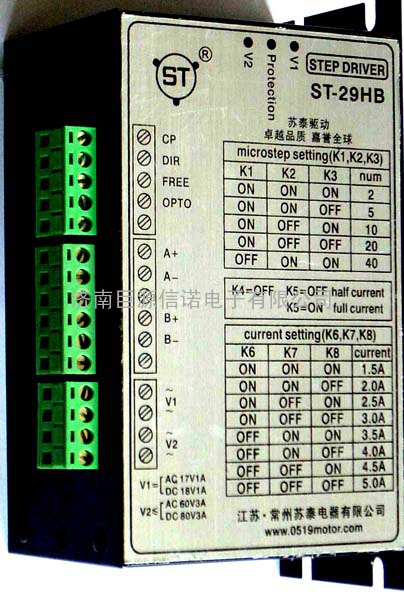
.gif) 3、细分数和电流选择
本驱动器是用驱动器上的拔盘开关来设定细分数的,根据面板的标注设定即可;请您在控制器频率允许的情况下,尽量选用高细分数;
驱动电流:根据不同电机,调节驱动器使输出电流与电机相匹配,如果电机能够拖动负载可以调节小于电机额定电流,但不能调节大于电机额定电流
具体设置方法请参考下图:
细分数由开关K1、K2、K3、K4选择。
单脉冲双脉冲选择K5
K5=ON 单脉冲方式
K5=OFF 双脉冲方式
半流全流设定由K6选择。
K6=OFF 电机通电不工作时半流
K6=ON 电机通电不工作时全流
ST-39H
4.控制信号输入连接图
信号接口:
CP+ 步进脉冲信号正端
CP- 步进脉冲信号负端
DIR+ 方向电平信号正端
DIR- 方向电平信号负端
EN+ 使能电平信号正端
EN- 使能电平信号负端
CW+ 正向步进脉冲信号正端
CW- 正向步进脉冲信号负端
CCW+ 反向步进脉冲信号正端
CCW- 反向步进脉冲信号负端
本驱动器的输入信号共有三路,它们是:步进脉冲信号CP、方向电平信号DIR、脱机信号FREE。它们在驱动器内部分别通过270欧的限流电阻接入光耦的负输入端,且电路形式完全相同。+COM端为三路信号的公共正端(三路光耦的正输入端),三路输入信号在驱动器内部接成共阳方式,所以+COM端须接外部系统的VCC,如果VCC是+5V则可直接接入;如果VCC不是+5V则须外部另加限流电阻R,保证给驱动器内部光耦提供8-15mA的驱动电流,参见下图.
如果输入电压超过5V,请参照表1,加装外接电阻R限流。
.gif) 5.步进脉冲信号CP
步进脉冲信号CP用于控制步进电机的位置和速度,也就是说:驱动器每接受一个CP脉冲就驱动步进电机旋转一个步距角(细分时为一个细分步距角),CP脉冲的频率改变则同时使步进电机的转速改变,控制CP脉冲的个数,则可以使步进电机精确定位。这样就可以很方便的达到步进电机调速和定位的目的。本驱动器的CP信号为低电平有效,要求CP信号的驱动电流为8-15mA,对CP的脉冲宽度也有一定的要求,一般不小于2μS(参见下图)。
 脉冲信号幅值: “H”┄┄4.0~5.5V, “L” ┄┄0~0.5V。
脉冲信号工作状态即占空比:50%或50%以下
6.方向电平信号DIR
方向电平信号DIR用于控制步进电机的旋转方向。此端为高电平时,电机一个转向;此端为低电平时,电机为另一个转向。电机换向必须在电机停止后再进行,并且换向信号一定要在前一个方向的最后一个CP脉冲结束后以及下一个方向的第一个CP脉冲前发出(参见下图)。
.gif) 7.脱机电平信号FREE
当驱动器上电后,步进电机处于锁定状态(未施加CP脉冲时)或运行状态(施加CP脉冲时),但用户想手动调整电机而又不想关闭驱动器电源,怎么办呢?这时可以用到此信号。当此信号起作用时(低电平有效),电机处于自由无力矩状态;当此信号为高电平或悬空不接时,取消脱机状态。此信号用户可选用,如果不需要此功能,此端不接即可。
8.外形尺寸:请参照下图
.gif) |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||