



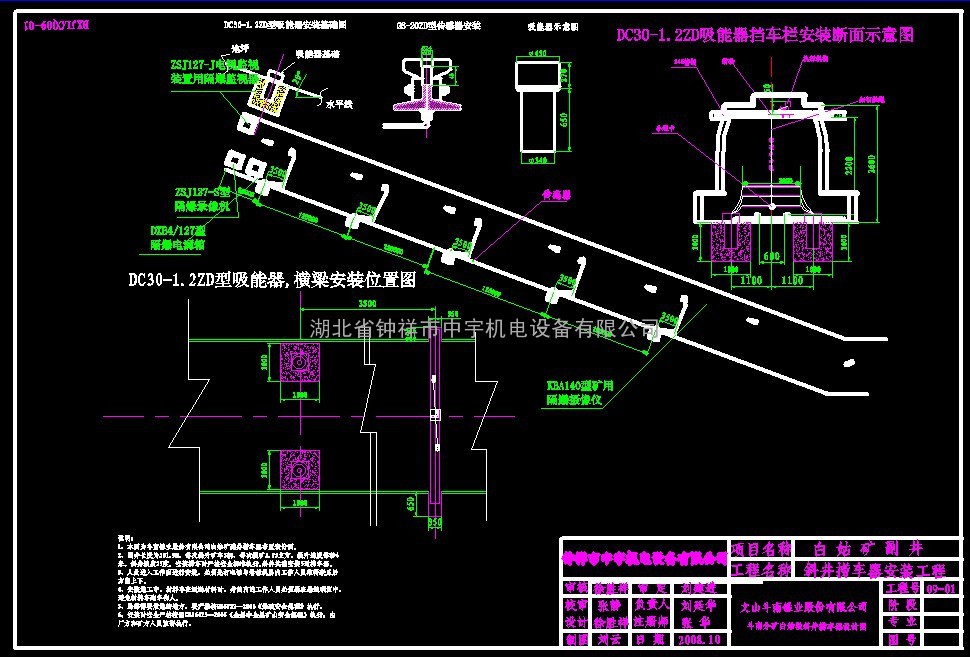
捞车器
ZDC30-1.2全自动绳网斜井捞车器防跑车装置采用微电脑控制拦车网的提升与下放,矿车正常运行时,拦车网会提起,矿车顺利通过后,拦车网立即下放到拦车状态,其原理是在轨道上安装一只速度传感器,传感器接收矿车前后轮通过的时间差后,把采集到得信息传输给微电脑PLC,微电脑分析该矿车的运行速度,超过预定速度时,微电脑会指挥拦车网拦车,达到防止矿车下行的目地。本系统为常闭式防跑车装,符合***对矿井“一坡三挡”的要求,具有以下特点:
(1)采用了多项抗干扰措施,并且将航空领域的双余度技术应用本系统中,国内首创,使系统的寿命延长,可靠性大幅提高;
(2)采用***的PLC控制和轨道传感器测速,使时间的测量达到1ms、速度测量达到0.01m/s的精度,提高了系统控制的准确度;
(3)具有故障报警、挡车栏状态指示、人车和货车分别控制,功能强大,控制方便;
(4)舰载机着陆的柔性减速缓冲器设计,***,吸能量大,使矿车的损伤程度降到了***低;
(5)控制系统具有自检功能,对各部件的工作情况进行巡检,特别是对挡车栏(车挡)的位置自检,***大限度地避免了系统的误动作,对于跑车脱轨能进行有效地拦截;
(6)有轨道双传感器、轨道单传感器等多个型号,品种齐全,可单台***使用,也可多台组网集中控制,安装简单,使用操作方便。
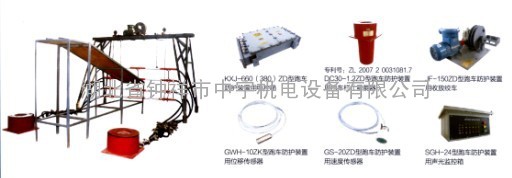
其装置由以下配件组成:
1, 拦车网
2,缓冲器
3,微电脑控制箱
4,传感器采集装置
5,卷扬机房显示、手动控制器
6,多台联网微电脑处理器
7,拦车网提升卷扬机
8,拦车网上行到位、下行到位装置等构成。
其主要技术参数为:
(1) 控制器电源:AC660V/380V或AC127V(&plu***n;10%)
本安***高开路电压: 21VDC
本安***大短路电流:90mA
(2) 传感器供电电压:24VDC(&plu***n;10%)
本安***高开路电压:22VDC
本安***大短路电流:<20mA
(3) 提升机电源电压:380/660VAC(&plu***n;10%);
提升电机功率:1.5~2.2kW( 根据巷道现场而确定)
***大提升重量:100~300kg
(4)定时精度:1ms
(5)吸能器制动距离:10m
吸能器阻力值:≥60kN
吸能量:2MJ
★ 另外,可根据不同斜巷的提升情况对吸能器阻力值及吸能量的不同要求,订制所需吸能器。