

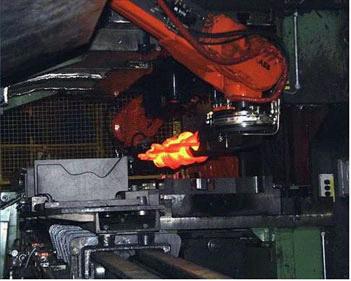



机器人与CNC机床比较,结构完全不一样,但关节型机器人和传统的CNC机床一样,具有多轴功能。因为机器人的控制器、编程软件和CNC机床的数控系统不一样,因而导致机器人与CNC机床的用途不一样。只要实现机器人的控制器和编程软件具有数控机床数控系统的相同功能,机器人就完全相同于CNC机床所具备的多轴驱动功能。使机器人有可能成为数控机床。
马丁路德机器人***采用机器人Robotmaster软件,同时把机器人的终端执行器变为具有铣削、钻削、雕刻等功能的主轴系统,就使机器人成为机加工机床。
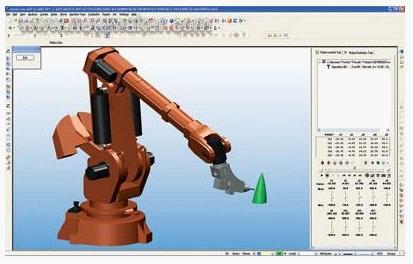
Robotmaster是一款计算机软件包,它可为机器人提供CAD/CAM为基础的脱机编程。是在数控机床的MastercamCAM软件中运行的。是一款广泛使用的CAM产品。
一、创建刀具路径
它以一个CAD几何文件开始,可创建2~5轴的刀具路径,用于相应工件的加工。从本质上来说,为机器人编程是从使用Mastercam软件的功能性开始的,并利用这个功能操控刀具的切削运动和方向,好像为数控加工创建一个普通的刀具路径。然后将这个加工刀具的路径转换成机器人的工作方式,并将其位置和方向结合在一起。
二、提取机器人数据
一旦在刀具轨迹被创建之后,Robotmaster软件模块让编程员从预先配置的机器人数据库中提取能代表伸缩式机械手各种制作和模型的数据。一般来说,Mastercam软件采用“机床组群”中的定义来确定为特定机床编程的刀具路径输出。然而在这种情况下,机器人编程模块能够使CAM软件处理预先配置的机器人,并将其作为机床结构***化类型的定义。这就能够让它利用机器人独特的结构体系,它不像一般CNC机床的结构体系。用户也必须确定其他的一些项目,例如像机器人的臂端工具。
三、转化机器人工作轨迹
下一步,在Mastercam软件框架中工作的Robotmaster软件参数屏幕,可以让用户微调机器人运作参数。该系统自动地将数控刀具路径转换成6轴机器人工作轨迹,从而生成机器人特定的运动轨迹作为其切削轨迹,以及包括用于“空程”运作的联合扫描运动。
当您为一台数控机床编程时,为机器人编程的其他模块将为编程人员提供一般所需要遵循的其余步骤。通过模拟装置,让用户验证和优化机器人程序,然后检查其发生碰撞的可能性等。模拟装置可演示机器人和工件或整个工作单元的模型,包括多台机床和工装夹具。***后以特定机器人所要求的格式,由一特殊的后处理器来编辑程序文件,以及采用什么类型的机器人。
马丁路德采用的这个软件广泛支持马丁路德的战略合作伙伴Motoman公司、Fanuc公司、ABB公司、Kuka公司和Staubli公司提供的机器人集成。马丁路德根据客户的实际需要设计集成,用于修整、焊接、喷涂、油漆、抛光、去毛刺/修边、调配、磨削和铣削等各种机加工机器人。实践证明,采用机器人铣削加工,对模具、图样和其他工件的生产是非常实用的,具有良好的经济效益。
更多机器人机加工视频,请访问:http://.cn/Robot-p
需要了解更多工业机器人集成,详情请登入工业机器人集成:http://.cn/联系方式如下:***:1642351669 束小姐 手机13685238930
若有其他需要,可发电子邮件联系,邮箱:1642351669@***.com