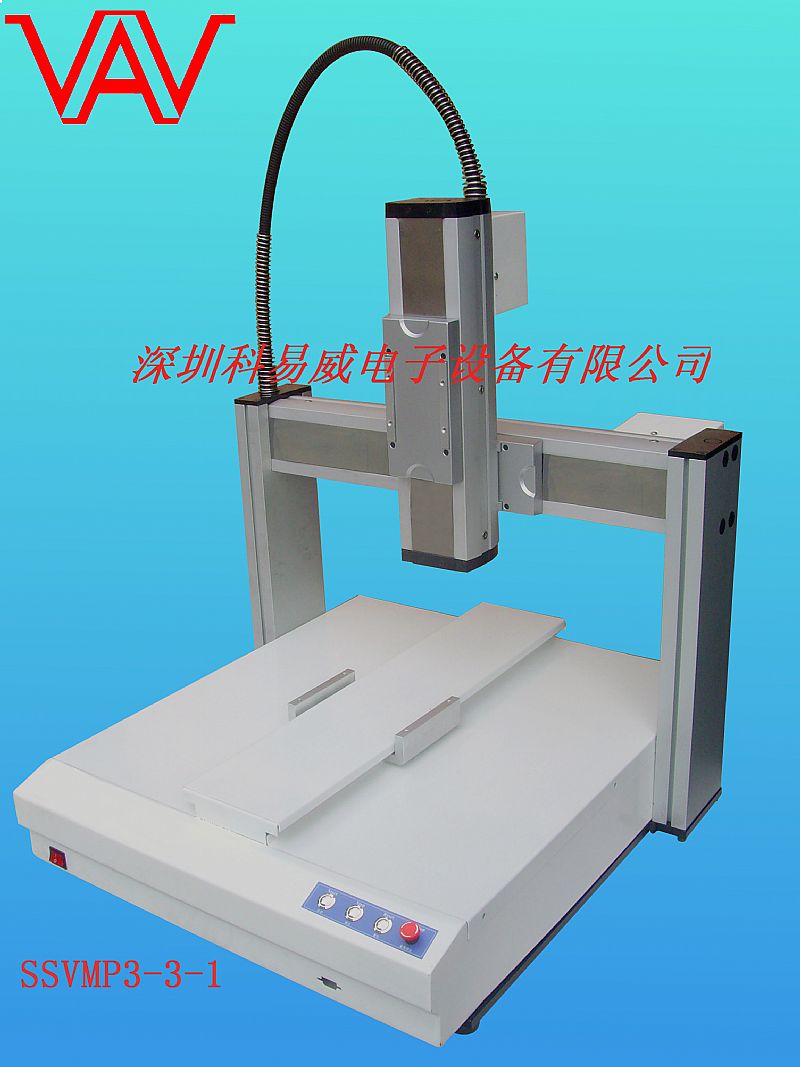



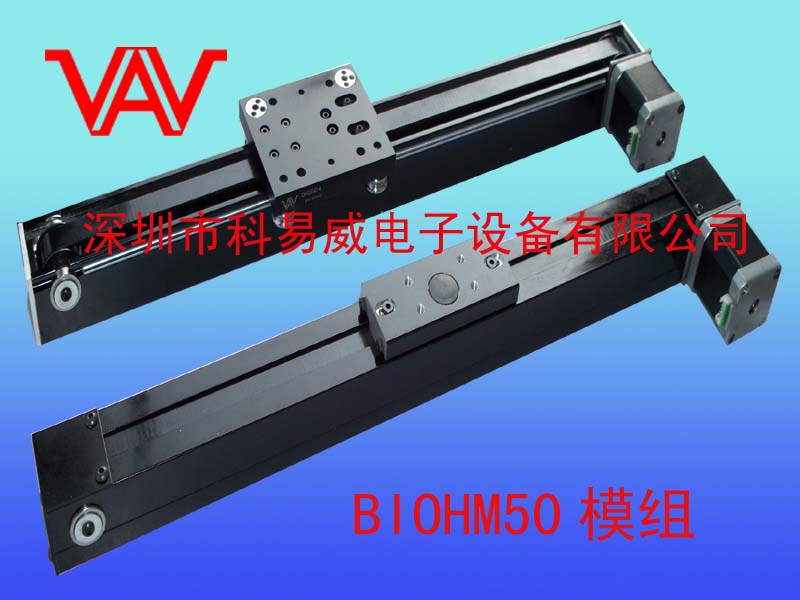

三轴运动平台多轴运动平台、2轴3轴4轴移动平台、工业机械手、单臂机械手、梁式机械手、线性模组. 一、用途: 以X、Y、Z三轴形成三维组合,并以X轴为支撑轴形成稳定的梁式架构,以完成在三维空间内的运动操作。 二、三轴平台设计原理和特性 X、Y、Z三轴都采用线性模组,秉承了线性模组的所有特性。导轨主要部分采用***的高强度、高直线度铝型材,型材内部配有特殊的圆钢轴保证机械强度并长期保持平行度,滑块是偏心螺母设计和防松移设计,可自己调节滑块松紧。采用线性模组特别定做的步进马达作为X、Y、Z三轴的运动驱动(使用直线电机驱动滑块运行,使其在停电的情况下滑块保持原状,不会因为负载而掉下来,免去突发停电运行不当的担忧)。三轴都原配好了限位感应器,减去了客户另配感应器的麻烦;可根据客户要求在出厂前打好孔。三、应用广泛。不仅广泛用于测试、点胶机、自动化生产设备等行业,还可根据客户需求,改装成简易机器人,设计、安装及维护都很简单方便。可根据客户工艺需要,设计***适用的机型。 四、技术参数:工作范围X/Y/Z 300×300×100mm(可根据客户要求定做) ***大速度 500mm/sec 机械精度 &plu***n;0.02mm 重复精度 &plu***n;0.02mm 传动系统 步进马达/皮带 机器尺寸约 528*523*567mm 重量 45五、 常用配套件: 1. 运动控制系统简介:运动控制技术在自动化产业机械上的应用极为普遍,如X-Y工作台,机械手,机械臂,点胶机,滴塑机,浇注机,***送料,轮切,飞剪,飞锯,等等。运动控制技术的实现包括以下几个部分: 1). 主控制器:完***机交互,图案数据处理,计算,存储,有的系统还要完成插补计算。实现平台:PC。 2). 运动控制器:完成插补计算,脉冲输出及与电机驱动器信号的连接,位置测量,逻辑处理(限位信号,操作信号等)。实现平台:PC卡或***于PC自运行的运动控制器。 3). 电机及其驱动器:为实际运动控制的执行机构。实现平台:步进电机或交流伺服电机 2.图控软件功能描述: 1)、人机交互:即运动轨迹的录入、编辑、储存。支持的图案元素包括点、直线、3点圆弧、3点圆、折线、多点曲线、特殊功能(用户自定义),输入方法为引导示教式。 2)、数据处理:按输入图案规划运动轨迹,完成插补计算,数据存储。 3)、内置驱动:内置脉冲输出及与电机驱动器的接口及驱动,同时也包含用于位置测量,逻辑处理(限位信号,操作信号等)的信号的输入输出。 4)、数据转存:输入的数据可通过USB接口进行拷贝转存。 5)、用户接口:可通过I/O链接方式与任意品牌PLC交换数据,完成用户自定义控制功能。对用户方PLC的端口要求是5I/1O,通讯协议采用我方的开放的自有协议。 kg 备注:可通过配置不同导程的丝杠获得不同的速度及分辨率。
深圳威迩威导轨有限公司
普通会员第14年
|
公司主营:三轴平台 线性模组 双轴心直线导轨