



1. 简介
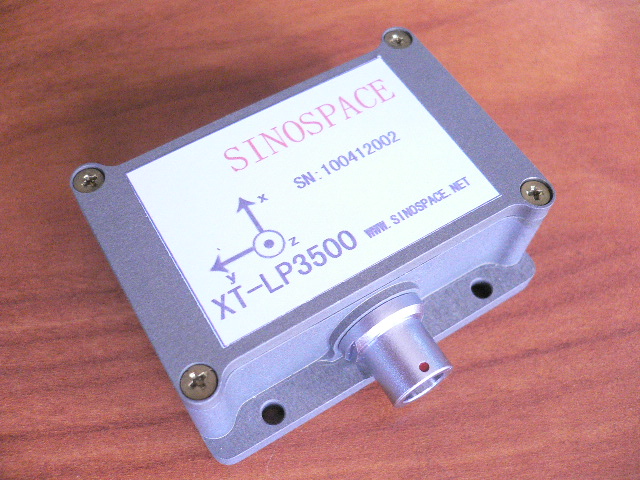
微型航姿参考系统(MAHRS)3DM-S
2. 特性
实时三轴惯性输出;
大于 100Hz 的内部更新率;
尺寸小;
低功耗;
RS
3. 应用领域
车载控制系统;
航空航天电子系统;
虚拟现实系统;
平台稳定系统;
机器人控制等。
4. 工作原理及软硬件框图
微型航姿参考系统(MAHRS)3DM-S
数据更新率可达到100Hz 以上。
5. 规格
表1 3DM-S
|
性能指标 |
极限值 |
单位 |
|
供电电压 (Vss-Vdd) |
-0.3 … +6 |
V |
|
引脚电压范围 |
-0.3 … +6 |
V |
|
结温 |
+125 |
ºC |
|
引脚电压范围 |
-0.3 … +6 |
V |
|
结温 |
+125 |
ºC |
表2 3DM-S
|
性能指标 |
***小 |
典型 |
***大 |
单位 |
||
|
输出数据格式 |
原始数据、四元数、姿态角 |
|
||||
|
内部更新率 |
100 |
Hz |
||||
|
启动时间 |
|
< 1 |
|
sec |
||
|
静态角度误差 (航向) |
0.1 |
0.2 |
1 |
degree |
||
|
静态角度误差 (俯仰、滚动) |
0.03 |
0.05 |
0.1 |
degree |
||
|
重复性误差 (航向 ) |
0.1 |
0.5 |
2 |
degree |
||
|
方向角分辨率 |
|
>0.01 |
|
degree |
||
|
陀螺速率测量范围 |
|
&plu***n;500 |
|
°/sec |
||
|
加速度测量范围 |
|
&plu***n;2 |
|
g |
||
|
磁力计测量范围 |
北京神州天宫科技有限公司电话:传真:联系人: 地址:主营产品:倾角传感器\\电子罗盘\\陀螺仪\\加速度传感器\\GPS Copyright © 2024 版权所有: 产品网店铺主体:北京神州天宫科技有限公司 免责声明:以上所展示的信息由企业自行提供,内容的真实性、准确性和合法性由发布企业负责。产品网对此不承担任何保证责任。 | |||||