
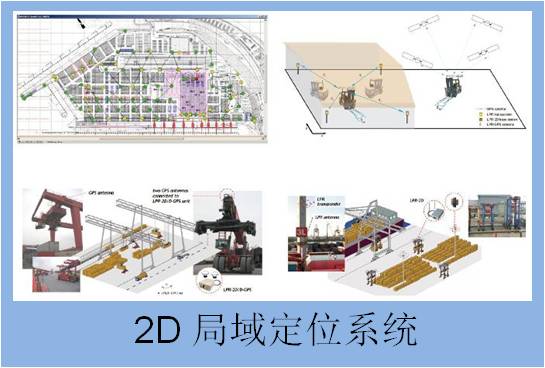
通过***测量移动站和三个基准站(位置已知)之间的距离,可以推算出该移动站的动态位置。固定设备称作异频雷达收发机(TP),移动物体称作***(BS),BS 上安装2 个天线,BS 可以单独计算两个天线的位置,这样不仅可以测量位置,而且可以测量方位角。
LPR ***测量移动物体和固定参考站(异频雷达收发机)之间的距离。安装在移动物体上的***或者远程处理单元(PC 或者带处理单元的雷达收发机)可以计算被跟踪物体的位置坐标。通过安装在移动物体上的双天线,可以测量确定坐标系下的方向角。广泛应用在车辆***或者物流跟踪场合。
通过LPR+GPS 接收机产品,车辆或者移动物体可以用于户内和户外的连续跟踪,差分GPS 在收星正常的条件下可以达到0.5m的精度,当载体移动到建筑物等收不到GPS ***的区域时,系统自动启动本地***雷达模式,异频雷达收发机就相当于安装在地球上的***,同样可提供几个厘米的***精度。
局域***系统主要应用在物流***,车辆***,AGV 导航,起重机防撞等。
德国Symeo公司系列产品: LPR-2D, LPR-2DB/DGPS;
我们研发和应用非接触式传感测量技术,提供高可靠性的距离测量,实时***和导航系统。
局域***雷达(LPR),使用无线电信号,适应全气候工作能力。无线电信号为国际通用的I***波段免执照频率。
本产品能够适应户内户外,高振动,高温度,灰尘等恶劣环境。通过软件平台来处理不同安装位置的传感器,可以输出用户自定义坐标下的***位置。可以通过TCP/IP或者串口协议与控制层快速融合。
2D位置测量原理
通过***测量移动站和三个基准站(位置已知)之间的距离,可以推算出该移动站的动态位置。
固定设备称作异频雷达收发机(TP),移动物体称作***(BS),BS上安装2个天线,BS可以单独计算两个天线的位置,这样不仅可以测量位置,而且可以测量方位角。
2D***和跟踪系统
LPR***测量移动物体和固定参考站(异频雷达收发机)之间的距离。安装在移动物体上的***或者远程处理单元(PC或者带处理单元的雷达收发机)可以计算被跟踪物体的位置坐标。通过安装在移动物体上的双天线,可以测量确定坐标系下的方向角。广泛应用在车辆***或者物流跟踪场合。
通过LPR+GPS接收机产品,车辆或者移动物体可以用于户内和户外的连续跟踪,差分GPS在收星正常的条件下可以达到0.5m的精度,当载体移动到建筑物等收不到GPS***的区域时,系统自动启动本地***雷达模式,异频雷达收发机就相当于安装在地球上的***,同样可提供几个厘米的***精度。
LPR-2D局域***系统设计用于户内/户外移动物体(起重机、车辆等)的实时***。系统实时测量***(安装在载体上)和固定参考点(雷达收发机)之间的距离,进而解算出位置和航向值。
该系统非常容易安装到当前环境中,固定参考站之间可安装于不同的高度和距离间隔。通过合理的布局,即使与某个参考站之间的联系发生中断,也不会影响***信息的获取。
MAP软件用于显示和监视LPR系统,可通过点击来获取移动测量站或者整个系统的状态信息。