

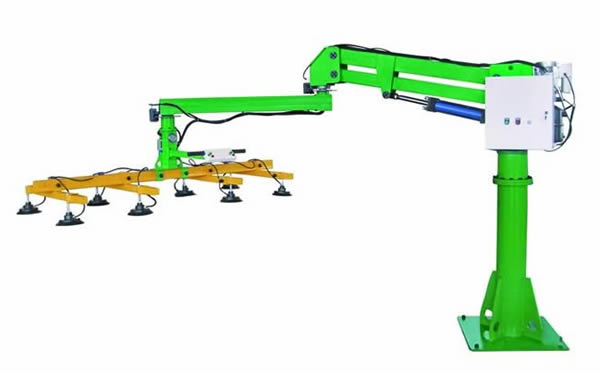


一、工业搬运码垛机器人概述:
本工业搬运码垛机器人属四自由度柱面坐标机器人,非常适合搬运码垛做业。柱面坐标机器人的空间位置机构主要由旋转基座、垂直移动和水平移动轴构成,其动作空间呈圆柱形。此码垛机器人有四个自由度,除旋转基座、垂直和水平移动外,还有前端端持器的旋转共四个自由度。
本工业搬运码垛机器人为柱面坐标
其他工业搬运机器人为球形坐标
二、工业搬运码垛机器人运动范围:
此机器人运动范围以固定端持器的法兰盘的中心所能到达的范围来确定。
三、工业搬运码垛机器人的工作环境:
1、请确保安装地面的水平度在&plu***n;5°以内。
2、确保地面和安装座有足够的刚度。
3、工作环境温度必须在0℃~45℃之间。(在低温条件下运行时,由于润滑脂/油的粘度较高,会引起误差或者过载,请先以低速预热机器人。)
4、相对湿度在35%~85%之间,无凝露。
5、确保安装位置无***、腐蚀性液体和气体。
6、确保安装位置不受过大的振动影响。
7、确保安装位置***小的电磁干扰。
8、确保安装位置有足够的机器人运动空间,并安装安全围栏。
四、工业搬运码垛机器人基本参数:
型号 ODB-150 ODB-100
机械结构 四关节机器人
动作方式 柱面坐标
码垛重量(包括抓手) 150kg 100kg
码垛能力(***大) 1300c/hr 1300c/hr
动作轴标准四自由度动作
范围Z-Axis(Vert.) 2300mm 2400mm
R-Axis(long.) 1500mm 1600mm
θ-Axis(turn.)330°
α-Axis(wrist.)330°
抓 手气动抓抱式或真空吸附式
码垛记忆能力标准30种、(可多达400种)
示教方法手动示教/示教支援/示教免除(可选择)
电源( 200V 3PH 50Hz) 6.5KVA 3 KVA
压缩空气0.5Mpa
机器人本体重量(不包括抓手) 1150kg 750kg