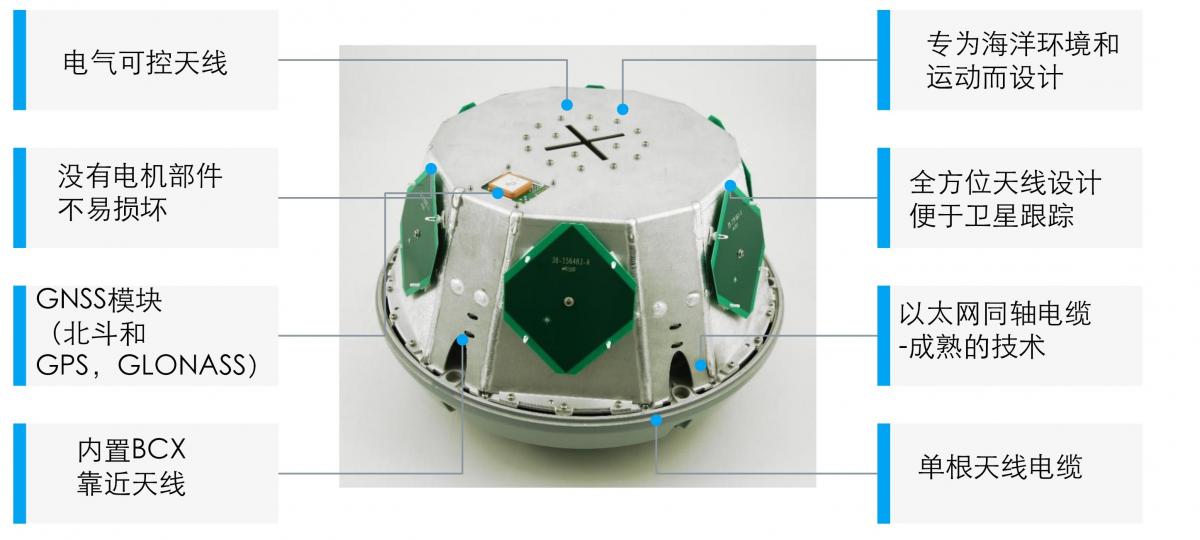



 海鸥4300 无人船无线+***通信系统 无人船是一种依靠自身携带的能源进行自主航行的水面平台,或称为水面机器人。无人船通过实时遥控或预设的控制程序在内陆湖泊或海洋中航行,搭载特定的任务平台,执行特定的任务,并将采集到的数据实时回传到岸端。无人船可以代替工作人员从事水上作业,目前在环保、测绘、安防甚至军事等领域得到了广泛应用,具有重要的经济价值、社会价值、价值。无人船需要将采集到的数据实时回传至岸端,因此,无人船与岸端之间需要有可靠的无线通信链路。然而,由于电磁波传播的固有限制,无线通信通常只支持视距通信,对于传输距离、天线架设高度以及天线的方向性很敏感,加之无人船通常船体较小,天线架设高度很低,这样,当无人船距离岸端较远、无人船所处的湖面/海面浪涌环境加剧、无人船被其他船只或岛屿遮挡时,无人船的通信性能会急剧恶化甚至中断,威胁其安全航行,同时也对其执行任务带来不利影响。因此,需要一种更稳定、可靠的无人船通信方案。技术实现要素:为此,我们提供一种无人船***通信方法及系统,来***解决,上面存在的问题。 系统特点 • 采用模块化、压铸铝(IP67)、低功耗设计 • 支持同频或异频还与***相互组网 • 功率稳定、动态功率可调 • IP数据非视距透明传输 • TDD-OFDMA工作模式 • 无线信道采用AES128位加密 • GPS或北斗时钟同步控制 • 远程平台控制 • ******覆盖 • 无人船与无人船之间***通信 • 无人船与岸端之间***通信应用协助完成警戒巡逻、情报收集、监视侦察、扫猎雷、探潜、火力打击和充当通信中继等***支持任务, 海洋环境观测, 海底地形地貌探测等 海鸥4300天线海鸥4300的天线可以在地平线以下高达20°的角度传输,这对于无人船所处的湖面/海面浪涌环境加剧是有利的。重要的是小化或减少该区域中的金属障碍物,以获得佳信号质量,避免辐射功率的反馈,海鸥4300的***收星天线,便于时时接收***信号,海鸥4300天线无伺服跟踪系统的控制算法,不易损坏。 海鸥4300主机标准IP:上行/下行176/352 kbps,以太网/ LAN:4个端口,I / O连接器:1连接器 状态LED:全状态LED面板,SIM卡插槽:1个SIM卡插槽用于铱星SIM卡,海鸥4300不仅可作为***的终端提供高速的***连通,也可无缝地组合无人船上的通信网络,从而使原有的服务有理想的技术手段来提供成本有效的网络,第二个备用通信信道。海鸥4300是采用专门设计的、易于配置集成器‘智能盒子’来提供这一能力的。 无人船运动横摇 +/- 30 deg. per 8 s, max. 0.5g tan 纵摇 +/- 15 deg. per 6 s, max. 0.5 g tan 首荡 +/- 10 deg. per 50 s, max. 0.2 g tan 纵荡 +/- 0.2 g 横摇 +/- 0.2 g 垂荡 +/- 0.5 g 转弯速度 +/- 6°/s; ACC 1°/s2 船速度 15 m/s (30 knots) 风速 200 km/hr (108 knots) 海鸥4300
海鸥4300 无人船无线+***通信系统 无人船是一种依靠自身携带的能源进行自主航行的水面平台,或称为水面机器人。无人船通过实时遥控或预设的控制程序在内陆湖泊或海洋中航行,搭载特定的任务平台,执行特定的任务,并将采集到的数据实时回传到岸端。无人船可以代替工作人员从事水上作业,目前在环保、测绘、安防甚至军事等领域得到了广泛应用,具有重要的经济价值、社会价值、价值。无人船需要将采集到的数据实时回传至岸端,因此,无人船与岸端之间需要有可靠的无线通信链路。然而,由于电磁波传播的固有限制,无线通信通常只支持视距通信,对于传输距离、天线架设高度以及天线的方向性很敏感,加之无人船通常船体较小,天线架设高度很低,这样,当无人船距离岸端较远、无人船所处的湖面/海面浪涌环境加剧、无人船被其他船只或岛屿遮挡时,无人船的通信性能会急剧恶化甚至中断,威胁其安全航行,同时也对其执行任务带来不利影响。因此,需要一种更稳定、可靠的无人船通信方案。技术实现要素:为此,我们提供一种无人船***通信方法及系统,来***解决,上面存在的问题。 系统特点 • 采用模块化、压铸铝(IP67)、低功耗设计 • 支持同频或异频还与***相互组网 • 功率稳定、动态功率可调 • IP数据非视距透明传输 • TDD-OFDMA工作模式 • 无线信道采用AES128位加密 • GPS或北斗时钟同步控制 • 远程平台控制 • ******覆盖 • 无人船与无人船之间***通信 • 无人船与岸端之间***通信应用协助完成警戒巡逻、情报收集、监视侦察、扫猎雷、探潜、火力打击和充当通信中继等***支持任务, 海洋环境观测, 海底地形地貌探测等 海鸥4300天线海鸥4300的天线可以在地平线以下高达20°的角度传输,这对于无人船所处的湖面/海面浪涌环境加剧是有利的。重要的是小化或减少该区域中的金属障碍物,以获得佳信号质量,避免辐射功率的反馈,海鸥4300的***收星天线,便于时时接收***信号,海鸥4300天线无伺服跟踪系统的控制算法,不易损坏。 海鸥4300主机标准IP:上行/下行176/352 kbps,以太网/ LAN:4个端口,I / O连接器:1连接器 状态LED:全状态LED面板,SIM卡插槽:1个SIM卡插槽用于铱星SIM卡,海鸥4300不仅可作为***的终端提供高速的***连通,也可无缝地组合无人船上的通信网络,从而使原有的服务有理想的技术手段来提供成本有效的网络,第二个备用通信信道。海鸥4300是采用专门设计的、易于配置集成器‘智能盒子’来提供这一能力的。 无人船运动横摇 +/- 30 deg. per 8 s, max. 0.5g tan 纵摇 +/- 15 deg. per 6 s, max. 0.5 g tan 首荡 +/- 10 deg. per 50 s, max. 0.2 g tan 纵荡 +/- 0.2 g 横摇 +/- 0.2 g 垂荡 +/- 0.5 g 转弯速度 +/- 6°/s; ACC 1°/s2 船速度 15 m/s (30 knots) 风速 200 km/hr (108 knots) 海鸥4300
北京中新信通科技有限公司
普通会员第8年
|
公司主营:卫星电话 铱星9555 铱星9575 铱星Pilot 海事TT710 TT700 TT727 TT3...