




HCC-96RF-S 韩国HITROL HCC-96RF-S 韩国HITROL
详询请致电:132.4667.5433 吴经理
工作Q-Q:1139878854
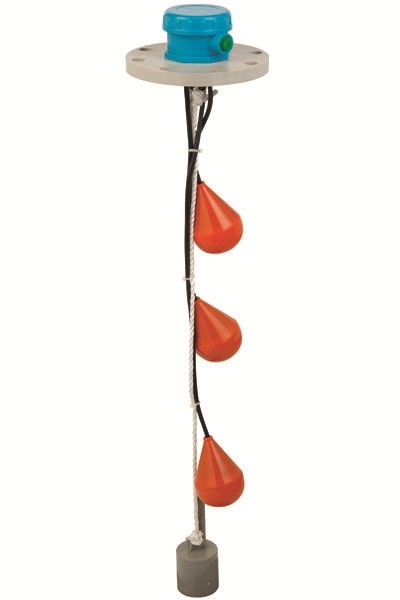
浮球液位计HT-100R
产品简介
连杆浮球液位计是利用浮球内磁铁随液位变化,来改变连杆内的电阻与干簧管所组成的分压电路,分压信号可经过转换器变成4-20mA或其它不同之标准信号。干簧管的间隙愈小,精度愈高。可配合其他二次表远距离指示,是一种原理简单,可靠性***的液位计。
产品特点
1.机构简单、安装方便、使用寿命
2.不受蒸汽、泡沫、液体挥发性气体影响
3.指示机构与被测介质完全隔离,密封性好,使用安全
4.耐高温,***高耐温达280℃,并可适用多种腐蚀性介质
5.多种材质可以选择,适合多种场合使用
6.性能稳定可靠,抗干扰能力强
测量原理
连杆浮球液位计结构主要基于浮力和静磁场原理设计生产的。带有磁体的浮球(简称浮球)在被测介质中的位置受浮力作用影响,液位的变化导致磁性浮子位置的变化。浮球中的磁体和传感器(干簧管)作用,使串联入电路的元件(如定值电阻)的数量发生变化,进而使仪表电路系统的电学量发生改变。也就是使磁性浮子位置的变化引起电学量的变化。通过检测电学量的变化来反映容器内液位的情况。
该液位计可以直接输出电阻值信号,也可以配合使用变送模块,输出电流值(4-20mA)信号,同时配合其他转换器,输出电压信号或者开关信号(也可以按照客户需求转换器由公司配送)。从而实现电学信号的远程传输、分析。
应用范围
连杆浮球液位计几乎可以适用与各种工业自动化过程控制中的液位测量与控制,可以广泛运用于石油加工、食品加工、化工、水处理、制药、电力、造纸、冶金、船舶和锅炉等领域中的液位测量、控制与监测。
代理HITROL浮球液位计
详询请致电 吴经理:132.4667.5433
工作Q-Q:1139878854
产品介绍
HITROL振动式水平控制器 EPS Spare Parts
型号: HTM-930
原理
该传感器由一个模块组成的振荡器线圈和感应线圈。当介质不与传感探头接触时,传感器由振荡器线圈连续振动。然而,一旦介质接触探头,振动频率和感应线圈的输出显着降低,和答复输出信号被***的控制器。可用于报警和过程控制。
特征
各种固体和粉末的水平可以被检测到;性能优良的低或高密度粉末;长生命周期由于不动的部分;不需要根据测量材料调整灵敏度;适用于低密度粉。
工作方式:振动感应
安装方式:侧面或者顶面安装
感应部分材质:ss304
符合标准: IP65
适用压力/温度:10kg/cm2 250 deg.C
连接尺寸:P/T 3/4”
顶部材料: C.S.
测量长度:235mm(标准)
名称:控制单元
型号: HLC901P
安装方式:普通安装
电压: AC110/220 50/60HZ DC24V
输出信号:1-SPDT
安装方法
传感器应安装使用英制3/4管螺纹,耦合或指定法兰;传感器不应安装在入口待测材料;然而,当传感器安装在入口待测材料,保护板应安装传感棒以承受落料力;电缆压盖的方向应转发到地面。
布线方法
采用双线绞合屏蔽电缆当接线传感器和单元;标准长度是6米;然而,当之间的距离传感器和单位超过6米,这是必需的电缆规格与代理商咨询;传感器与单元之间的接线时应使用单独的电缆管道供电传感器信号;它应该接地的传感器或单位;灵敏度可以调整使用拨号;如果它是逆时针拨号,振动变弱灵敏度变高;但是,如果顺时针方向,振动变强和灵敏度变低。
美国Microstrain航向参考系统 陀螺仪
G-Link-200
G-LINK-200-OEM 无线三轴加速度计
SG-Link-200 3通道的无线传感器
V-Link-200 USB网关的配置和数据收集
RTD-Link-200 无线RTD/电阻传感器节点,6通道
TORQUE-LINK-200 坚固的无线扭矩/应变传感器节点
LC-Link-200-OEM 1通道的无线节点
IEPE-LINK-LXRS 无线IEPE传感器节点
TORQUE-LINK-200 坚固的无线扭矩/应变传感器节点
WSDA-2000 网络连接无线网关
WSDA®-200-USB 上传数据的网络网关
WSDA® -Base -102 -LXRS® 模拟输出***任何连接的传感器
WSDA® -Base -101 -LXRS® 模拟输出传感器
DEMOD-DC® 微型、低成本DVRT信号调理模块
DEMOD-DC® 接触线性传感器
DEMOD-DVRT® -2 线性传感器
LS-LVDT 位移传感器
NC-LVDT,非接触式,位移传感器
Microminiature Gauging LVDT
Microminiature LVDT
Subminiature Gauging LVD
M-LVDT,微型,自由铁芯,位移传感器
LORD sensingmicrostrain®微型位移传感器
DEMOD-DIGITAL 数字信号调节器
3DM-CX5-45 高性能GNSS导航传感器
3DM-GQ4-45 GNSS / INS***级GNSS导航传感器
3DM-RQ1-45 航向参考系统
3DM-GX5-45 陀螺仪
3DM-CX5-25
3DM-CV5-25
3DM-GX5-25 高性能姿态参考传感器
Sensor参数
Multi-C***tellation receiver tracks up to 32 satellites
High Performance Accelerometer
25 µg/√Hz (8g option)
80 µg/√Hz (20g option)
Super-stable Gyro
8 dph in-run bias (-40 to +85°C)
Offset temperature hysteresis 0.05°/s
ARW 0.3°/√hr
Pitch-roll Dynamic Accuracy &plu***n;0.2°
Highly compact and low profile
44.2 mm x 36.6 mm x 11 mm
20 grams
USB and RS-232 interfaces
–40 to +85 °C operating temperature range
姿态和航向参考系统(AHRS)是一种集成了多轴、加速度计、陀螺仪和磁力仪的设备,用于估计空间中物体的方位。俯仰、横摇和偏航的测量是典型的数据输出。Microstrain公司的AHRS惯性传感器通常用于机器人和无人驾驶车辆的导航。
GNSS辅助惯性导航系统
一种用于移动机器人应用的低成本固态惯性导航系统(INS)提供导航支持,其中包括一个扩展卡尔曼滤波器(EKF),并对移动机器人车辆的位置和方向进行估计。两个陀螺仪也被用来评估机器人的方向估计。对于无人飞行器(u***)和测绘,惯性导航系统,与在二维环境下实现SLAM相比,机载实现在计算复杂性和闭环方面存在一些困难,在车辆导航和观测方面都有很高的非线性。提出了一种机载SLAM的实现方案,以直接和间接地降低计算复杂度。
我们的实现是基于一个扩展的卡尔曼滤波器(EFK),它使用从其视觉系统收集的惯性测量单元(IMU)的数据。