
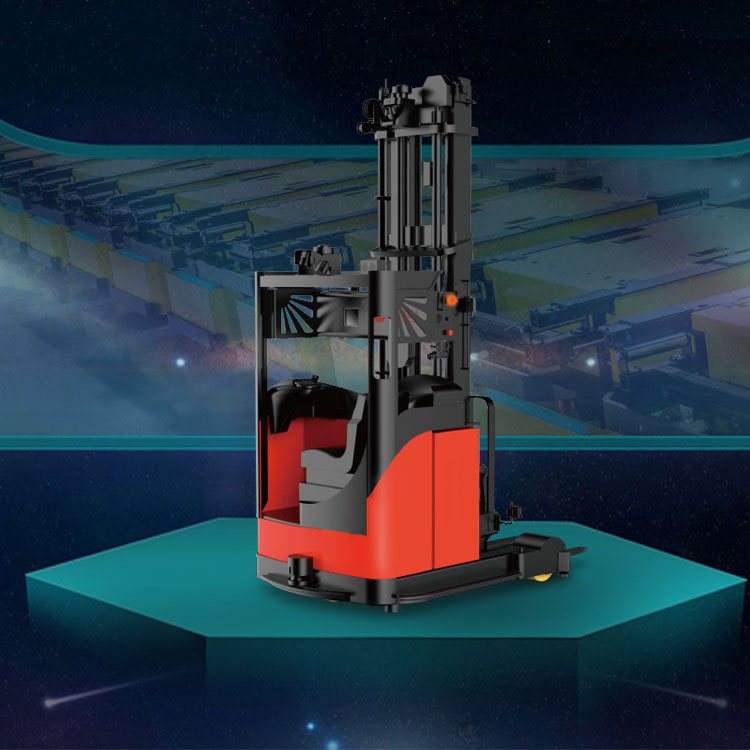



机加工自动化生产线-山东康道智能,在车床上下料机器人臂的设计时,工程师严格遵守设计原则,车床上下料机器人在载荷和速度下,实现在机器人所要求的工作空间内的运动。在进行车床上下料机器人臂设计时,要遵循下述原则:
1.应尽可能使机器人手臂各关节轴相互平行;相互垂直的轴应尽可能相交于一点,这样可以使机器人运动学正逆运算简化,有利于机器人的控制。
2.车床机器人的结构尺寸应满足车床机器人上下料动作的工作空间的要求。工作空间的形状和大小与机床上下料机器人臂的长度,手臂关节的转动范围有密切的关系。





■ 模块化设计,高集成封装,安装快捷;
■ 一线品牌核心配件,长使用寿命;
■ 傻瓜式编程,手摇轮视教,快速调机;
■ 傻瓜式操作与维护,当天培训当天上岗;
■ 通用性强,兼容同类型的多种零部件,实现柔性化生产;
■ 可实现1人值守10台以上机床,是“机器换人”的理想产品。


