图8 Fuzzy—PI控制器
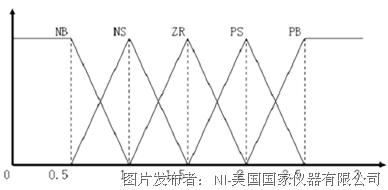
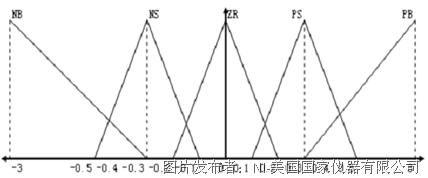
在Fuzzy算法中,本系统利用实时车速与预定车速轨迹的误差量定义相关特征变量的归属函数,即实时速度归属函数(图9)、速度误差量归属函数(图10)及速度积分误差量归属函数(图11)。上述三个归属函数均采用三角形分布的归属函数,由于试验车是自动档车型,怠速下的速度***大值在5Km/h左右,而本系统是将车速控制在3Km/h以下,故速度归属函数介于0-3Km/h。一般而言,考虑微控制器的运算速度情况下,所设计的语意法则不超过9个,结合本系统轮速传感器的有效精度是0.01Km/h,故在上述三个归属函数均采用了5个模糊语言变量。
图9 实时速度归属函数 图10 速度误差量归属函数
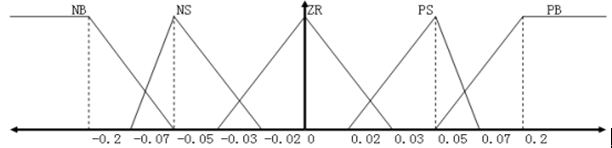
图11速度积分误差量归属函数
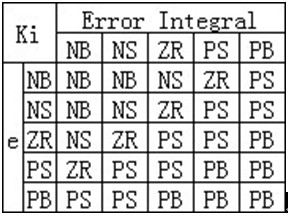
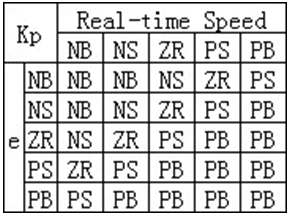
相关归属函数的定义原则是当速度误差较大时调整为较大参数,使得速度可以快速的收敛到预定轨迹,反之若误差量较小时调整为较小参数,使得速度可以稳定在预定轨迹附近。速度积分误差量的归属函数定义则是为了解决系统的稳态误差,即减小实时车速与预定轨迹车速间的误差。KP及KI的模糊控制表如表2、3所示。
经多次测试后得到的特征变量参数如(5)及(6)式所示。***后在解模糊化时,本系统采用***大隶属度去***大值法。
KP={18/NB,10/NS,5/ZR,10/PS,20/PB} (5)
KI={20/NB,10/NS,8/ZR,10/PS,15/PB} (6)
表2 KP模糊控制规则表 表3 KI模糊控制规则表
四. 软件实现与现场结果
4.1 系统结构
基于LabVIEW的倒车自动刹车系统主要分为两个部分:
4.1.1 数据采集(下位机部分)
依据前文所述的系统模块可将数据采集分为两个部分。在测距模块中,驱动NI 9264模拟输出产生周期为30ms的40kHz超声波激励信号,通过NI9205接收反射波信号,并利用Labview的脉冲探测函数计算超声波的传播时间,从而计算出车—障碍物的实时距离。在刹车控制模块中,利用NI 8473与车载CAN网络无缝连接,实现DPC与车载设备的数据交互。
4.1.2 数据处理(上位机部分)
数据传输及数据处理(即DPC)是基于LabVIEW2010平台开发的。刹车控制模块的数据传输通过LabVIEW2010平台下的CAN模块与车载CAN网络实时通信,获取实时车速及EVB实际压力值的CAN报文,并通过相同的CAN通道发送EVB期望压力值报文。DPC使用LabVIEW平台中的“生产者—消费者”模型对数据采集部分返回的大量实时数据按一定周期进行处理,以此减少系统耗时从而加快程序处理的速度并提高系统的响应速度。通过LabVIEW状态机结构对车辆实时状态进行特征参数提取,以此确定车辆在倒车行进过程中的加速状态、匀速状态以及减速状态,并针对不同状态进行相应的控制。
4.2 控制软件界面及功能
数据传输、处理与控制软件界面主要包括3大功能模块:参数配置模块、功能验证模块以及报表输出模块。界面如图12、13、14所示。
Nikon 4S007-582 AFINTF6 PCB Board
Nikon 27124-1 PCB Board
MKS 622A01*** Baratron Pressure Transducer
AudioCodes TP-610 ME594V01 Voice card
Com Match ComMatch / ALVARION TLVI21AA TLVI2101 Module
Shurflo 8090-801-278 PUMP ASSEMBLY 230V 100PSI 1.3G N/V
Edwa*** HVA 3" Pneumatic Gate Valve GVI-75P NC***-89-000
Advantech PCL-812PG 30 kS/s 12-bit 16-ch ISA Multifunct
Applied Materials / AMAT 1A0477801KR-08011 Upper Inner
Applied Materials / AMAT 1A0922701IS-07005 Upper Inner
AMETEK Pittman GM14902D347-R3 12-8800-049 30.3 VDC 500
POWERMAX ll P21NSXC-LSS-NS-08 1.8 STEP MOTOR
K&L 162-0388 PC BOARD 106-978-0523 SWITCH DRIVER BOARD
VAT Angle Valve 62034-KA18-1005/0435 A-308917
HP Ethernet Je***rect 170X J3258A J3258-61002
Applied Materials 0021-02348 Rev 009 Ring Clamp Middle
Applied Materials AMAT 0090-91767ITL X3AB Implant Divis
Perkin Elmer 851-8242-006 A5102 PCB Assymbly Board
Nikon 4S586-946 SPA136A VCM Amplifier
SVG A***L Exhaust Flow Controller Board 99-80315 03-8031
Fusion Semiconductor Systems PWB ASSY 249321 249331 Rev
Fusion Semiconductor Systems PWB ASSY 249331 249321 REV
Fuji Electric FVR004E7S-7EX Digital Inverter
ZARAK / Abacus System Controller SW Version 4.0N5 82-01
GILAT 43460 PC010330A 43-4600-40 VME Module
Bio-Chem Valve 105T4-S1 12VDC
SWAGELOK 6LVV-DPFR4-P-C Pneumatic VALVE
Granville Phillips 307 Vacuum Gauge Controller 307130
Axerra Eurotherm Temperature Controller 91E
SII IF5003-02B 3B66254842 THERMAL PRINTER CONTROLER BOA
GE Fanuc Series 90-20 Programmable Controller IC692CPU2
LOT OF 12 PACCOM GENERIC PRDOUN-266C25-256-46R 256MBx12
PENTAX D-BC88 Battery Charger
Crydom CWD2450 Solid State Relay
SCHNEIDER ELECTRIC / TELEMECANIQUE VCFN25GE SWITCH DISC
Omron S8VM-05005C Power Supply 100-240VAC 50/60Hz 0.8A
Integrated Power Designs CE-300 Power Supply 300W 100-2
HP StorageWorks DAT 72 DDS BRSLA-0208-DC Q1522-69201 In
Synel Industries SY-780/A Time Clock Fingerprint ONLY
D-Link DG-102SH/E Ver A3 VoIP Station Gateway 220VAC
Applied Materials / AMAT 309C-00083 BOLT EYE M10 X 1.5
Applied Materials / AMAT 0050-80924 GASLINE BACKSIDE GA
Applied Materials 3300-04599 FTGFERRULE BACK 3/40D SST
Horiba-Stec MFC SEC-4400M 300 CCM GAS: GI2 Mass Flow Co
HP Agilent 85680-60009 Board Assembly PILOT 2ND IF AMP