




| 技术规格 |
| 导航 |
| GPS更新速率:1Hz |
| 航点模式下可设置舵机动作 |
| 航点模式下可改变高度 |
| 航点模式下可改变空速 |
| 用户可自定义待命航线 |
| 用户可自定义错误处理方式 |
| RPV和U***模式 |
| 支持DGPS精度 |
| 缓冲区可存储多达1000个航点命令 |
| 伺服 |
| 升降舵辅助翼,襟副翼,4个伺服副翼,***副翼,V-尾,X-尾,分离的方向舵 |
| 8 / 16 / 24 路舵机信号 |
| 伺服更新速率:50 Hz |
| ***的舵机和主电池电源 |
| ***监视的舵机电压和主电源电压 |
| 集成的RC |
| 伺服分辨率,11位 |
| 数传遥测,数据记录和视频 |
| 遥测功能(每秒发送100个用户自定义数据) |
| 遥测电文更新速率,5Hz |
| 板载数据记录:47组标准电文,可以记录4小时的飞行数据 |
| 5Hz数据记录更新速率 |
| 具有视频叠加功能(16个用户自定义数据域) |
| 控制系统 |
| 30 Hz的控制频率 |
| 可以优化增益参数 |
| 方向舵-副翼前馈控制提高了转向性能 |
| 副翼-升降舵前馈控制提高了在转向时的高度保持稳定性 |
| 具有自主起飞和降落功能 |
| 用户可自定义8个反馈控制回路 |
| 用户可自定义控制表查询功能 |
| HORIZONmp地面站软件 |
| 系统包括HORIZONmp地面控制软件 |
| 用于操作训练的MP2028g模拟器 |
| 飞行可调节控制增益 |
| 飞行中可以移动航点 |
| 地面站可遥控任务舵机 |
| 传感器 |
| ***大空速: 500 KM/H ,600不可以超过 |
| ***大高度: 12000 m |
| 3轴加速度计,2G |
| 3轴陀螺仪 |
| ***大角速率:150°/s |
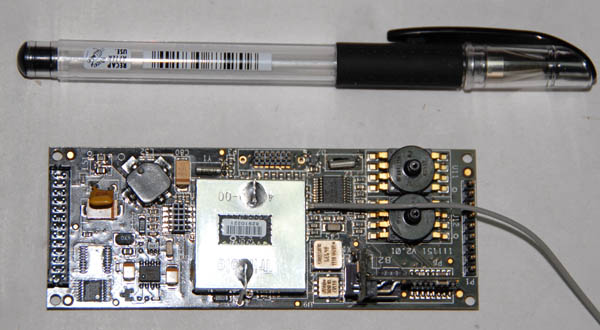
| 物理特性 |
| 重量:28g(包括GPS接收机,陀螺仪及所有的传感器) |
| 电流消耗(包括GPS接收机,陀螺,所有的产感器和GPS天线: 140mA @ 6.5V |
| 供电电压:4.2到26V |
| 长-宽-高:10厘米X4厘米X2厘米 |
| 支持自动驾驶仪软件内核升级 |