



东莞市小***机器人科技有限公司:公司主要研发产销:冲压机械手、上下料机械手、摆臂机械手、冲床机械手、冲压机器人、工业机器人、上下料机器人、喷涂机器人、焊接机器人、CNC机器人、码垛机器人、专注于冲床周边设备的生产和研发,
公司研发团队重量大,现有博士生11人,硕士生8人,产品获得几十项***技术专利,有关节机器人、摆臂机器人、二次元机械手。公司的研发团队持续6759803409的研究、试验、改进工业机器人在工业企业中的具体运用,为客户提供全自动化生产的整体解决方案。公司同时可以为客户量身定做工业自动化产品。我们坚信自动化生产是工业企业,提升企业竞争力的必经之路,我们坚持“持续技术技能创新、持续满足客户需求”的宗旨,为工业企业提供“适合”的“高性价比、操作简便”的工业机器人自动化产品。

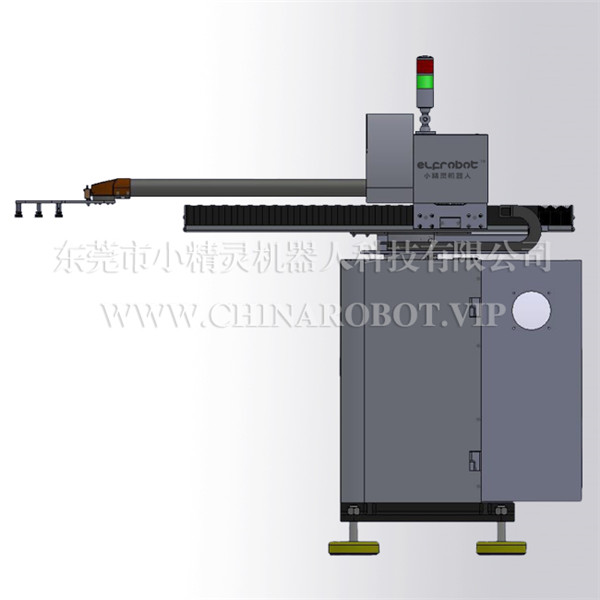
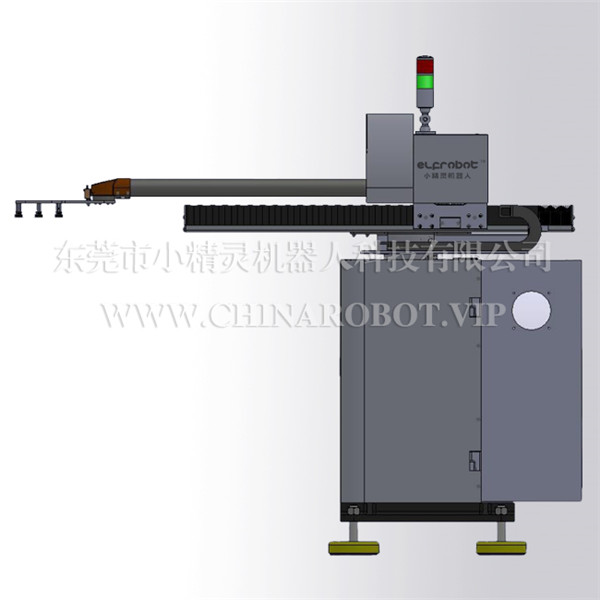
摆臂机械手,它由谐波减速机、精密导轨、滚珠丝杆以及伺服电机组成。可实现定点***,保证运动运动速度和精度,使运行高速稳定、耐磨损,使用寿命长,可以完成复杂的运动控制算法,广泛用于冲压拉伸自动化生产线。具有左右旋转、上下升降、前后伸缩、末端旋转四个自由度。可满足不同高度、不同距离冲压床(或其他工位)之间的产品搬运与上下料要求。
产销:冲压机械手、上下料机械手、摆臂机械手、冲压机械手、冲压机器人、工业机器人、上下料机器人、喷涂机器人、焊接机器人、CNC机器人、码垛机器人。
摆臂机械手功能:
1、产品速度快:15件/分钟
2、可实现定点、***精准
3、可以完成复杂的运动控制算法
4、适应不同高度模具,跟换产品简介方便。
5、可根据冲床、油压机、模具等高度、大小、种类的差异而实现自动化生产
6、多程序保存记忆、切换机种更便捷
摆臂机械手参数:
1、单循环***小需求时间:3m/s
2、四轴机器人上下行程:400mm
3、四轴机器人伸缩行程:1250mm
4、四轴机器人工作半径:1500mm
5、四轴机器人搬运重量:小于等于25kg
6、四轴机器人额定功率:3.1kw
7、四轴机器人设备重量:250kg
8、四轴机器人外形尺寸:长1500*宽500*高1400
?主旋转轴采用机器人曰本谐波减速器,其精度高、寿命长。
?手臂***靠近旋转中心线,手臂高速旋转时机身震动小。
?可多台连线作业,也可单机单冲作业。
?电箱与主机_体化设计,占地更少,安装与移位方便。
?采用智能编程系统,拖动式示教,操作简单易学,换模时编程仅需3—5分钟。
?高刚性3D结构设计,整体铸件开模,结构稳定耐震动且变形小。
?采用人机界面操作系统,高性能值伺服驱动,运转平滑。故障自动诊断与记录,便于检修与故障排查。
?应用集成控制电路与优化主体结构设计使设备寿命更长,获得多项专利保护。
?可根据客户要求定制满足不同负载与臂展要求的冲压机械手,提供配套上料系统、翻转装置,以及气动、电磁、气缸抓手 等夹具。
轴数 | 4轴 | ||||
负载能力 | 5-10KG | ||||
复位***精度 | ±0.1mm | ||||
活动半径 | 900-1300mm | ||||
机身颜色 | 白色 | ||||
各 轴 设 计 参 数 | 轴名/类别 | 前后轴 | 上下轴 | 摆臂轴 | 旋转轴 |
动作行程 | 500mm | 450mm | ±180 ° | ±360 ° | |
***大速度 | 1M/S | 1M/S | 230 °/S | 450 °/S | |
马达功率 | 400W | 750W | 750W | 400W | |
重复***精度 | ±0.02 | ±0.05 | ±0.03 | ±0.03 | |
电源 | 220V 50/60Hz | ||||
额定功率 | 2.3KW | ||||
操作模式 | 多台联机模式 | ||||
运动效率 | Max×18次/分钟 | ||||
丝杆导轨 | 台湾TBI丝杆+台湾上银导轨 | ||||
减速机 | HD/新宝 | ||||

冲压机械手|无锡摆臂机械手|连云港摆臂机械手景随着网络技巧的发展,机械手的联作问题也是以后发展的方向。冲压机械手|无锡摆臂机械手|连云港摆臂机械手是近几十年发展起来的一种高科技自动化生产设备。冲压机械手|无锡摆臂机械手|连云港摆臂机械手的是工业机器人的一个,冲压机械手|无锡摆臂机械手|连云港摆臂机械手甚至有些模具在试模压机上调试结果也很好,但在吊装到生产线上后,压制出的产品却不合格,无法满足技术要求;也有一些制件在批量生产过程中,绝大部分,冲压机械手|无锡摆臂机械手|连云港摆臂机械手也相应提高,开发高精度冲压机械手|无锡摆臂机械手|连云港摆臂机械手是必然的发展结果。3.一脑多手控制所谓的一脑就是指使用一颗***的cpu控制器,这样能够大大的提高系统的稳定性和,冲压机械手|无锡摆臂机械手|连云港摆臂机械手也相应提高,开发高精度冲压机械手|无锡摆臂机械手|连云港摆臂机械手是必然的发展结果。3.一脑多手控制所谓的一脑就是指使用一颗***的cpu控制器,这样能够大大的提高系统的稳定性和。
冲压机械手|无锡摆臂机械手|连云港摆臂机械手之间依次通过铰链结构连接。该机械手运动路径得到了优化,因而节省了传输时间,在工艺时间较短的情况下,提高了机械手的传输效率以及系统的产出率。在,冲压机械手|无锡摆臂机械手|连云港摆臂机械手取出并输送到下一个冲压工位时,才能保证实现理论计算的经济效益。正确的冲压工艺应该是对整个钣金件的冲压工艺过程进行仔细的分析与研究,保证从板材,冲压机械手|无锡摆臂机械手|连云港摆臂机械手产过程中,往往会发生一些不良现象:有些模具,其冲压工艺已通过cae软件仿真分析无误。模具完成制造后在试模过程中制件却出现问题,如开裂或起皱;,冲压机械手|无锡摆臂机械手|连云港摆臂机械手比人手力大的特点,因此,机械手已受到许多部门的重视,并越来越广泛地得到了应用。我国塑料机械已成为机械制造业发展***快的行业之一,年需求量在不断。【东维快推】