
CAN总线式机械手控制器
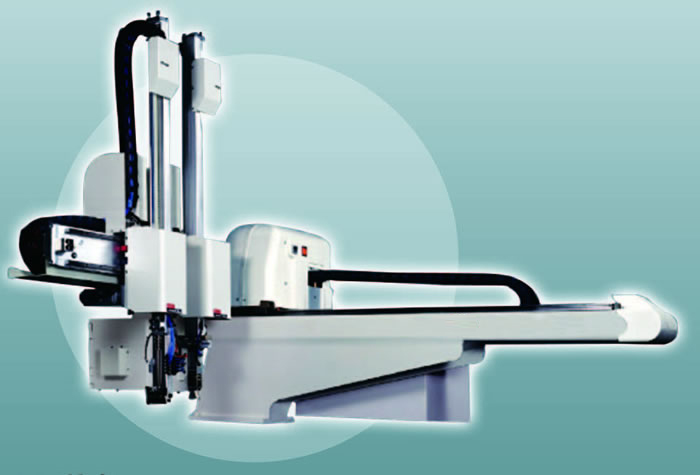
机械手可在空间抓放物体,动作灵活多样,适用于可变换生产品种的中、小批量自动化生产,广泛应用于柔性自动线。我们开发的用于热处理淬火加工的物料搬运机械手,是一种按预先设定的程序进行工件分拣、搬运和淬火加工的自动化装置,可部分代替人工在高温和***的作业区进行单调持久的作业,并可根据工件的变化以及淬火工艺的要求随时更改相关控制参数。由于目前许多商品化的工业机器人(或机械手)大都采用封闭结构的专用控制系统,一般采用专用计算机(如PUMA工业机器人使用PDP-11)作为上层主控计算机,使用专用机器人语言(如VAL)作为离线编程工具,采用专用微处理器,并将控制算法固化在EPROM中[1],这种专用系统很难进行扩展、修改或再集成外部硬件(如传感器)和软件。因此,我们自行开发了气、电混合驱动的三自由度圆柱坐标型机械手以及相应的物料分拣装置,并根据其控制要求设计了基于CAN总线的分式布开放结构机械手控制系统。
展华供应:CAN总线式机械手控制器
东莞展华自动化设备科技有限公司
地 址:广东省东莞市南城区高盛科技园
北区B座209室
联系人:张先生
手 机:18802566095
电 话:+86-0769-28682618 28682628
传 真:+86-0769-28682638
邮 箱:dgtjs2012@
展华网站:http://robot-/