
一、目的
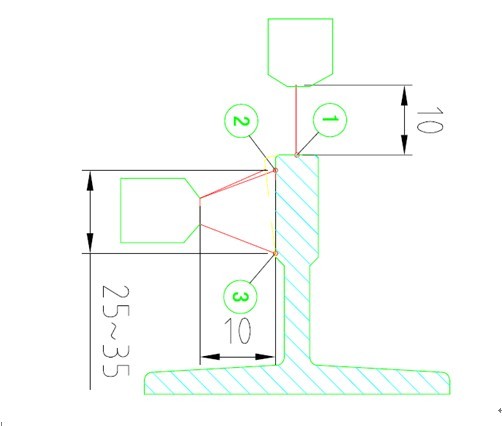
1、测量图中序号1点的距离变动情况,传感器距被测点距离为10mm,变动范围为10mm。
2、测量图中序号2点和3点的距离变动情况,传感器距被测点距离为10mm,变动范围为5mm,该处两点的尺寸主要用来确定2点和3点所在的导轨面是否倾斜,变动范围为5mm。
二、测量条件
激光检测传感器相对于导轨匀速运动,采样频率为一秒两次或以上
三、结果数据(举例)
|
|
***点 |
第二点 |
第三点 |
|
0秒 |
10.0 |
10.0 |
10.0 |
|
0.5秒 |
12.0 |
10.2 |
9.8 |
|
1秒 |
8 |
12.3 |
7.7 |
四、激光检测要求
1、传感器测量精度要求小于0.1mm
2、一套装置有两组附图中的传感器,所测量数据实时导入计算机,希望能通过软件在输出测量数据的同时输出第二点与第三点的差值和第四点与***点的差值。
五、激光检测解决方案
6个ZLDS100-15-15-2K-RS232-I-IN-AL-CC-3

激光检测主要特点:
ZLDS100R-4-39传感器可用于镜面和玻璃的表面测量;
量程***小2mm,***大1250mm(其他量程可订制);
量程起始距离***小10mm,***大260mm(其他距离可订制);
频率响应:2K、5K、8K、9.4K;
分辨率***高0.01%,线性度***高0.1%;
支持多个传感器同步采集(确保工业在线高精度差动测厚);
支持特殊量程(如远距离起始700mm小量程300mm等);
特殊应用(如路面平整度,高温被测体,管道内径,石油钻杆内外螺纹测量等均可定制);
针对串口,提供了运行应用的DLL开发库,方便用户开发应用软件;
非接触位移精密测量;
激光检测工作原理:基本原理是光学三角法:半导体激光器①被镜片②聚焦到被测物体⑥。反射光被镜片③收集,投射到CMOS阵列④上;信号处理器⑤通过三角函数计算阵列④上的光点位置得到距物体的距离
详情请访问:
英国真尚有集团
深圳市真尚有科技有限公司
电话:0755 - 26528100 / 26528011/26528012
传真:0755-26528210/26435640