






NanoPWM驱动器-代替线性驱动器
利用ACS所有的NanoPWM技术,产品线PWM驱动器提供的***的静止抖动和平滑的速度性能,相较于经典的商业上可用的线性驱动器。
ACS的NanoPWM驱动器提供***好的运动性能(保证的),减小安装尺寸,减少热耗散,和经济的价格。NanoPWM驱动器是******驱动器用于450MM和300MM晶圆制程平台,也可以用于其他需要以平滑的速度和亚纳米级抖动的高速度和加速度的伺服控制应用。
用一个Spilplus的控制器和NanoPWM驱动器控制一个直线平台,可以达到下面的性能:
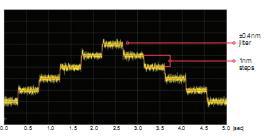
*静止抖动好于0.3纳米(机械平台)
*跟随误差在速度100MM/秒时为10纳米(气浮平台)
纳米***和高速度
当需要高速度,纳米***的分辨率时,OEM厂家至今局限于昂贵的激光干涉仪反馈系统,用ACS的10MHZSpilplusSin-Cos编码器差分器,控制系统设计师现在有了经济的替换方案,用模拟量光学编码器或者激光原理的超快编码器就够用了。
******和柔性的龙门控制
对于高精度龙门***平台,有两个电机(每个有自己的反馈)被用来控制一个轴。ACS运动控制已经开发了独特和有力的算法提供***水准的******度,速度稳定性,和整定时间。
龙门算法主要特征: 优势:
*带解耦环的MIMO控制 *更高的带宽
*纵向伺服环控制 *更好的稳定性
*旋转(偏摆)方向伺服环控制 ****小的轴相互干扰
*自动力/编码器调度作为横梁轴位置的函数 *调试简单
*偏摆角的动态补偿 *可靠的操作
*刚性龙门和柔性龙门都适合
ACS
为性能设计的强大平台
ACS强大的平台由EtherCAT主站MPU(运动处理器)和在每个EtherCAT从站上的伺服处理器(SPil).MPU可以管理至多达64个同步轴的系统,执行高水平任务,比如通讯ACSPL+和PLC编程,诊断1/o控制和轨迹的规划。在每个节点上的SPil浮点处理器执行时控制算法***多到4个轴,他们每个轴的采样和刷新率都是20KHZ.
MPU可以修改和刷新SPil控制算法,插入激励信号到控制对象并采样实时数据,比如20KHZ的位置误差。
ACS利用分布式处理器平台已经超过20年了。采用EtherCAT对来说是很自然的演变。分布式系统遇到的所有逻辑和安全相关的问题都在很久前解决(比如控制器,节点和通讯连接故障失效系统的响应,MPU失效轴会发生什么问题)。使ACS在当今的工业中能够提供***坚固的EtherCAT控制解决方案。
高度集成,增加***度和产量
性能取决于所有的器件-控制器,软件,驱动器,电源的内部连接和支持工具。这些部件的每个部分在设计和优化过程中为了成就一个目标,增加你的机器的性能。完整的系统通过测试确保运动性能不处在将就的水平。