拉绳位移编码器_***量式编码器品牌_桁萱自动化科技手机:18017028721 13818890446 (储经理)
桁萱自动化科技(上海)有限公司是一家集研发、销售和5434783793系统集成为一体的科技实业型企业。本公司主要致力于自动化控制系统的开发,工业自动化产品分销和系统集成;并且代理销售欧美***的品牌编码器,传感器及其配套仪器仪表。
本公司始终坚持于“诚信经营,优质服务,合作共赢”的经营理念:不仅与生产厂家、供货商、客户保持良好的合作关系,还汇聚了一批在工控领域具有多年经验的高素质和***率的销售和技术人员,为广大客户提供优质的自动化产品和技术支持等服务。
本公司供应编码器、拉绳位移传感器、编码器仪表、闸门开度仪,传感器以及编码器相关附件等产品和选型,以及自动化项目改造。我们成功的将这些***的系统解决方案和工业传感器产品广泛应用于我国的车辆控制系统,冶金控制系统,港口机械控制系统,船舶、航天航空、纺织机械、石油机械、矿业机械、电梯、机床、水利、精密机械、汽摩等行业以及其他工厂自动化和过程控制相关行业中。几年来,我们为上述行业提供了十余种测量控制系统解决方案和几万套传感器产品。
桁萱自动化科技(上海)有限公司
联系人:储经理
固话:021-57658113 021 -51096721
手机:18017028721 13818890446
邮箱:hxencoder@
***:272205845
网址:http://-/
地址:上海市嘉定区嘉好路1333号508
拉绳位移传感器的原理及应用
拉绳位移传感器又称拉绳传感器、直线位移传感器、拉绳电子尺、拉线盒、拉绳编码器。拉绳位移传感器是直线位移传感器在结构上的精巧构成,充分结合了角度传感器和直线位移传感器的优点,成为一款安装尺寸小、结构紧凑、测量行程大、精度高的传感器,行程从一百毫米至十几米不等。
拉绳位移传感器应用
拉绳位移传感器特别适合直线导轨系统,液压气缸系统、试验机、伸缩系统,仓储位置***,压力机械,造纸机械,纺织机械,金属板材机械,包装机械,印刷机械,水平控制仪,建筑机械等相关尺寸测量和位置控制,特别适合液压油缸的控制。完全可以替代光栅尺,其它应用场合可以定制,完全可以实现低成本的高精度测量。
HXM系列拉绳传感器技术参数
型号 | HXM150 | HXM250 | HXM350 | HXM450 | |
测量行程 | 0-5000mm | 0-10000mm | 0-15000mm | 1-30000mm | |
输出信号 | 可配置增量编码器、***值编码器。 | ||||
材料 | 外壳为铝,钢丝绳为316不锈钢。 | ||||
***高精度 | 测量***大行程的0.02%~0.05% | ||||
防护等级 | IP54 | ||||
工作温度 | -30~85℃ | ||||
典形应用 | 液压油缸行程检测、自动仓储、吊车提梁检测、试验机、伸缩系统等 | ||||
HXM系列拉绳传感器订货数据
型号HXM | 150 | /1000 | SG | F1 |
基本型号 | 行程 | 实际行程 | 输出信号 | 线性精度 |
HXM | 150=0-5000mm 250=0-10000mm 350=0-15000mm 350=0-30000mm | 500 = 500mm ~ 30000= 30000mm | SG = SSI格雷码 SB = SSI二进制 PG = 并行格雷码 PB = 并行二进制 L = 4-20mA V1 = 0-5V V2 = 0-10V R4 = RS485 RM = Modbus CA = CANopen DP = Profibus-DP FB = 脉冲信号 | F1 = 0.02FS F2 = 0.05FS |
***值拉线编码器


出厂参数:
拉绳规格型号 | 编码器型号 | 有效行程 | 数据方向 | 4-20mA设置方式 | 工作电压 |
HXM150/3000LF1 | HXM58/25E26.24BR010 | 3000mm | 拉出增大 | 软件设置 | 10-30VDC |
特性参数
工作电压 | 10-30Vdc 或5Vdc 极性保护 |
消耗电流 | < 110mA(24V电源) < 190mA(12V电源) |
输出信号 | RS485和4-20mA双输出,可设定长度、角度应用输出 |
输出负载能力 | ≤ 400欧姆,标准工作200-250欧姆 |
线性分辨度 工作圈数 | 1/4096 4096 |
工作温度 | -25—70℃ 编程时温度范围:0℃~+70℃ |
储存温度 | -40—100℃ |
防护等级 | IP65 |
允许转速 | 2400转/分 |
输出刷新周期 | <1.4ms |
连接电缆 | 1米8芯屏蔽电缆,或9芯插座 |
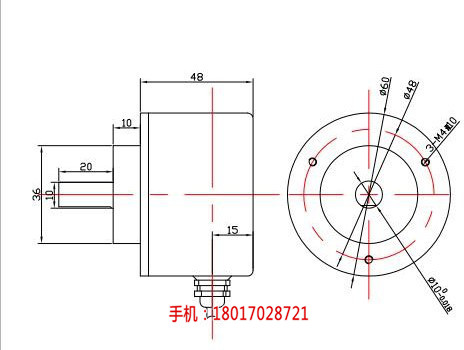
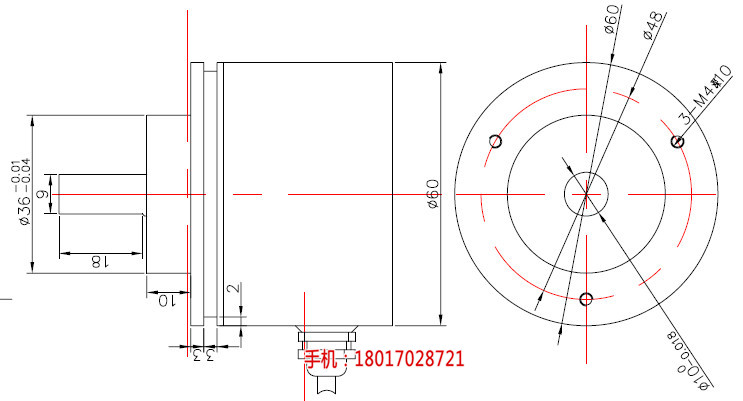
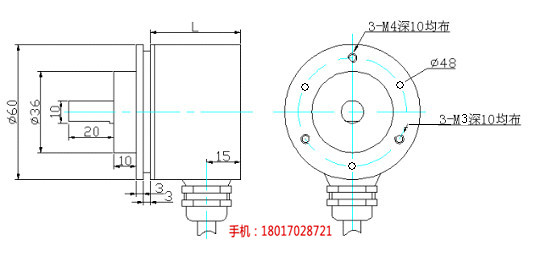
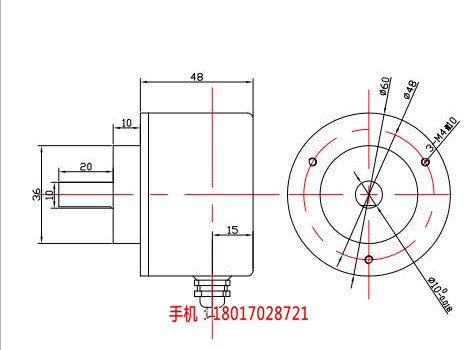
外形特征 | 夹紧同步一体式法兰,金属外壳,密封双轴承结构(见外形尺寸附图) |
转轴 | 见安装图 |
信号调整 | 可4mA输出微调,20 mA输出微调;可方向设置;可预设位置,外部置位,例如外部置零 |
接线说明
电缆输出 |
| 电缆输出 | ||
芯缆颜色 | 信号输出 | 芯缆颜色 | 信号输出 | |
棕色 | 10—30Vdc 工作电源 | 粉色 | 4—20mA输出+ | |
白色 | 0V GND | 黑色 | 4—20mA输出- | |
绿色 | RS485输出A | *** | 置零位 | |
*** | RS485输出B | 蓝色 | 设置允许线 | |
RS485通讯协议说明:
波特率:19200bps(固定不可设)
帧格式:数据位8位,停止位1位,无奇偶校验,无控制流。
编码器的参数需软件指令对编码器进行设定。
编码器为主动模式时,即编码器主动向上位机发送数据。数据长度为16位16进制ASCII码,格式为:XAB>±DATA↙,即:
1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 |
X | 地址 | > | ± | DATA | ↙ | ||||||||||
其中,“X”为前导字母,>位分割符,±为符号位。DATA为数据,ASCII格式,10位,由0~9构成,范围为-9,999,999,999~+9,999,999,999。***后是回车符(0D)。
编码器地址为被动模式时,即问答模式。上位机向编码器发送询问指令,指令为4位16进制ASCII码,格式为:D+AB↙。AB为编码器地址,范围为0到99。
1:读数据:
上位机发送:D+地址+0D 编码器回:X+地址+>+符合位+数据位+0D
例:上位机发送44 30 31 0D 编码器回:58 30 31 3E 2B 30 30 30 30 30 30 30 31 32 33 0D
2:读参数:(编程允许线接高电平时有效)
上位机发送:D+00+A+0D 编码器回: X+地址+a+方向+波特率+工作状态+工作模式+0D
例:上位机发送:44 00 41 0D 编码器回: 58 30 31 61 06 03 11 09 0D
(编码器地址01,顺时针增加,波特率19200,往复模式,被动模式。)
3:设置地址:(编程允许线接高电平时有效)
上位机发送:D+地址+B+新地址+0D 编码器回: X+地址+b+新地址+0D
例:上位机发送:44 30 30 42 30 31 0D 编码器回: 58 30 30 62 30 31 0D
(将地址00改为01)
4:设置方向:(编程允许线接高电平时有效)
上位机发送:D+地址+C+新方向+0D 编码器回: X+地址+c+新方向+0D
例:上位机发送:44 30 31 43 07 0D 编码器回: 58 30 31 63 07 0D
(将顺时针改为逆时针)
5:设置每圈分辨率:(编程允许线接高电平时有效)
上位机发送:D+地址+F+分辨率+0D 编码器回: X+地址+f+分辨率+0D
例:上位机发送:44 30 31 46 30 30 33 36 30 30 0D 编码器回: 58 30 31 66 30 30 33 36 30 30 0D
6:设置置位值:(编程允许线接高电平时有效)
上位机发送:D+地址+J+置位值+0D 编码器回: X+地址+j+置位值+0D
例:上位机发送:44 30 31 4A 30 30 30 30 30 30 30 30 30 30 0D
编码器回: 58 30 31 6A 30 30 30 30 30 30 30 30 30 30 0D
(设置置位值为0)
7:设置4mA对应值:(编程允许线接高电平时有效)
上位机发送:D+地址+G+对应值+0D 编码器回: X+地址+g+对应值+0D
例:上位机发送:44 30 31 47 30 30 30 30 30 30 30 30 30 30 0D
编码器回: 58 30 31 67 30 30 30 30 30 30 30 30 30 30 0D
(设置4mA对应0)
8:设置20mA对应值:(编程允许线接高电平时有效)
上位机发送:D+地址+H+对应值+0D 编码器回: X+地址+h+对应值+0D
例:上位机发送:44 30 31 48 30 30 30 30 31 30 30 30 30 30 0D
编码器回: 58 30 31 68 30 30 30 30 31 30 30 30 30 30 0D
(设置20mA对应值100000)
9:设置20mA微调:(编程允许线接高电平时有效)
上位机发送:D+地址+K+符合位+微调值+0D 编码器回: X+地址+k+符合位+微调值+0D
例:上位机发送:44 30 31 4B 2B 30 30 30 31 30 30 0D
编码器回: 58 30 31 6B 2B 30 30 30 31 30 30 0D
10:设置:4mA微调:(编程允许线接高电平时有效)
上位机发送:D+地址+Q+符合位+微调值+0D 编码器回: X+地址+q+符合位+微调值+0D
例:上位机发送:44 30 31 51 2B 30 30 30 31 30 30 0D
编码器回: 58 30 31 71 2B 30 30 30 31 30 30 0D
11:编码器置位指令:
上位机发送:D+地址+L+ M+和校验+0D 编码器回: X+地址+l+ m+和校验+0D
例:上位机发送:44 30 31 4C 4D 和校验0D 编码器回: 58 30 31 6C 6D和校验0D
(置当前位置)
12:设置工作模式:(编程允许线接高电平时有效)
上位机发送:D+地址+N+工作模式+0D 编码器回: X+地址+n+工作模式+0D
例:上位机发送:44 30 31 4E 11 0D 编码器回: 58 30 31 6E 11 0D
(工作模式设置10为循环模式,11为往复模式。)
13:设置往复***大值:(编程允许线接高电平时有效,)
上位机发送:D+地址+O+H+***大值+0D 编码器回: X+地址+o+H+***大值+0D
例:上位机发送:44 30 31 4F 48 30 30 30 30 31 30 30 30 30 30 0D
编码器回: 58 30 31 6E 48 30 30 30 30 31 30 30 30 30 30 0D
(设置***大值100000)
14:设置循环***大值:(编程允许线接高电平时有效,)
上位机发送:D+地址+P+L+***小值+0D 编码器回: X+地址+p+L+***小值+0D
例:上位机发送:44 30 31 50 4C 30 30 30 30 31 30 30 30 30 30 0D
编码器回: 58 30 31 70 4C 30 30 30 30 31 30 30 30 30 30 0D
(设置***大值100000)
参数表:
ASCII码 | 参数 | ASCII码 | 参数 |
03 | 19200bps波特率 | 09 | 被动模式 |
06 | 顺时针数据加 | 10 | 循环模式 |
07 | 逆时针数据加 | 11 | 往复模式 |
08 | 主动模式 |
编程允许线(蓝色)的使用
设置模式时,编码器蓝色线与棕色线并在一起接正电源,白色线接电源地线。此时,编码器的通讯速率固定为19200bps。非设置模式,即正常工作时,建议将蓝色线与白色线并在一起接电源地线。
RS485通讯的注意事项:
1. 通讯速率与传输距离是一对矛盾。速率越高,传输距离越近、但也越稳定,反之亦然。
2. 在外部电磁干扰强时,外部置位线在对编码器置位需接高电平,但置位结束后建议强制接低电平,以防止编码器由于外部干扰而突然回零。
3. 在外部电磁干扰强时,RS485接线***好使用双屏蔽电缆。
4. 多个编码器接上位机时,由于编码器返回数据没有奇偶校验,故建议在上位机编程时在时间上对各个编码器返回的数据进行区分。
5. 当系统中有电动机时,编码器电源需与其他电源隔离。
由于RS485电路是差分形式的,A+,B-都是带电压的,常时间接地或接高电平都会造成RS485电路损坏.
桁萱科技--技术部
电话:021-57658113
网址:-